 lecture
lecture ROS新人教育プログラム
Image by Ulrike Leone from PixabayROS新人のためのKobuki、Turtlebot2を使った教育プログラムです。研究室体験プログラムに参加している学部1年生やプレゼ...
lecture  lecture
lecture  deeplearning
deeplearning  robocup@home
robocup@home  robocup@home
robocup@home  robot
robot  misc
misc  misc
misc  misc
misc  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  deeplearning
deeplearning 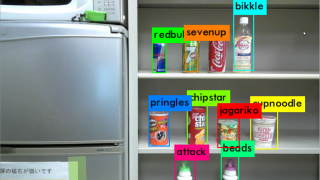 deeplearning
deeplearning  lecture
lecture  robot
robot 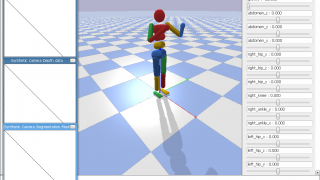 misc
misc 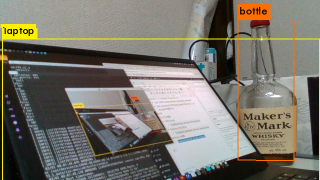 deeplearning
deeplearning 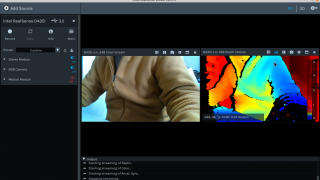 robot misc
robot misc  deeplearning
deeplearning  misc
misc  misc
misc 