 robot
robot Webots講座10:C言語でプログラミングしよう!
Webots講座の10回目です.今までPythonを使っていましたが,C言語でプログラミングしてみましょう.レファレンス Webots User Guide (Cyberbotics, Inc.)環 ...
robot  robot
robot  robot
robot 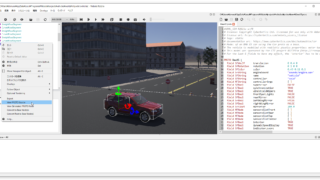 robot
robot  robot
robot  robot
robot  robot
robot  robot
robot 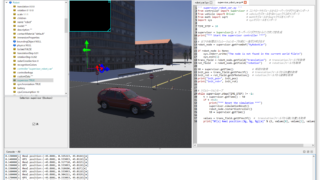 robot
robot  education
education  lecture
lecture  robot
robot  robot
robot  lecture
lecture  misc lecture
misc lecture  robot
robot  robot
robot  robot
robot  ROS2
ROS2  misc
misc  misc
misc  misc
misc  ROS2
ROS2  ROS2
ROS2  ROS2
ROS2  ROS2
ROS2  ROS2
ROS2  ROS2
ROS2  ROS2
ROS2