 lecture
lecture 専門実験2021(ロボット制御):ROS NoeticとOpenMANIPULATOR-Xのインストール
ROS Noeticのインストール 上で作成したUSB Linuxでコンピュータをブートし,Ubuntuの端末を開いて,次のコマンドを実行する. $ sudo apt update && sudo a...
lecture  misc
misc  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture 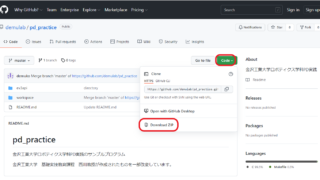 lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  robot
robot  robot
robot  robot
robot  robot robot
robot robot  robot
robot 