 lecture
lecture Webots講座6-2025:カメラを使った簡単な自動運転
Webots講座の6回目です.引き続きWebotsの自動運転シミュレータを使っていきます.今回はカメラセンサの使い方とそれを使った簡単な自動運転を実現します.コースの中央にある黄色ラインを追従するサン...
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  misc
misc  未分類
未分類  未分類
未分類  AIロボット入門
AIロボット入門  robot
robot  robot
robot  education
education 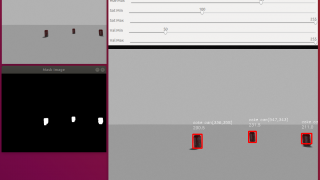 education
education  education
education  education
education  education
education  education
education  education
education  education
education  education
education  education
education  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture 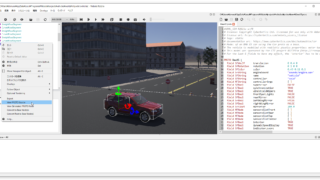 lecture
lecture 