 lecture
lecture HARD2020:シミュレータでの地図作成と自己位置推定
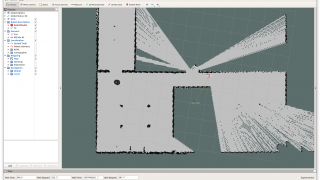
シミュレータGazeboを使って地図を作り、自己位置を推定し、目的地までナビゲーションする自律移動ロボットに必要な一連のタスクをさせましょう!ここでは地図作成にgmappingパッケージ、自己位置推定...
lecture 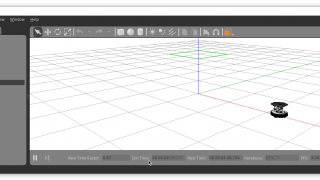 lecture
lecture 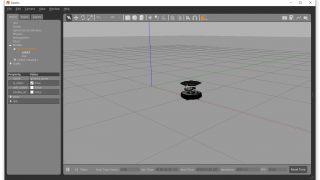 lecture
lecture 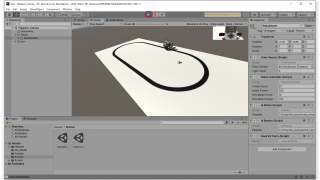 education
education  education
education  lecture
lecture  lecture
lecture  education
education  education
education  education education
education education  education
education 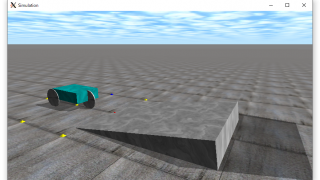 education
education  education
education 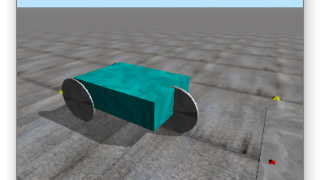 education
education  education
education  education
education  education
education  education
education  lecture
lecture  lecture
lecture  lecture
lecture 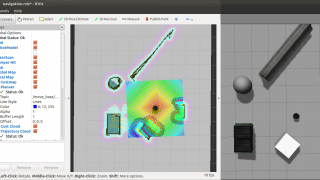 lecture
lecture  lecture
lecture 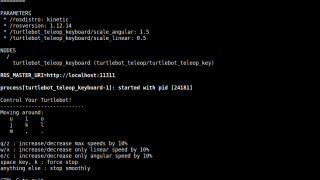 lecture
lecture 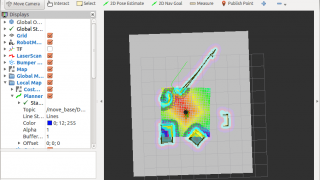 lecture
lecture 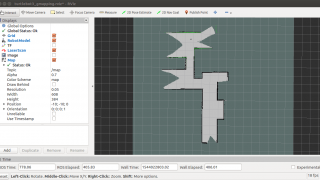 lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture 





 Users Today : 71
Users Today : 71 Users Last 30 days : 1003
Users Last 30 days : 1003 Users This Year : 1003
Users This Year : 1003 Total Users : 8722654
Total Users : 8722654 Views Today : 98
Views Today : 98 Who's Online : 0
Who's Online : 0