仮想シミュレーション環境「箱庭」V850版の使い方を説明する。ここでは授業で使用する通信方式MMAP版の説明だけを行う。UDP版はオリジナルである参考サイトを参照されたい。
- 参考サイト
- EV3ロボット制御プログラムのビルド
- 端末で以下のコマンドを実行してビルドする。
$ cd ~/src/ev3rt-athrill-v850e2m/sdk/workspace$ make img=<プログラムのディレクトリ名> clean$ make img=<プログラムのディレクトリ名>
- ビルドが成功するとaspという実行可能ファイルが生成される。
- 端末で以下のコマンドを実行してビルドする。
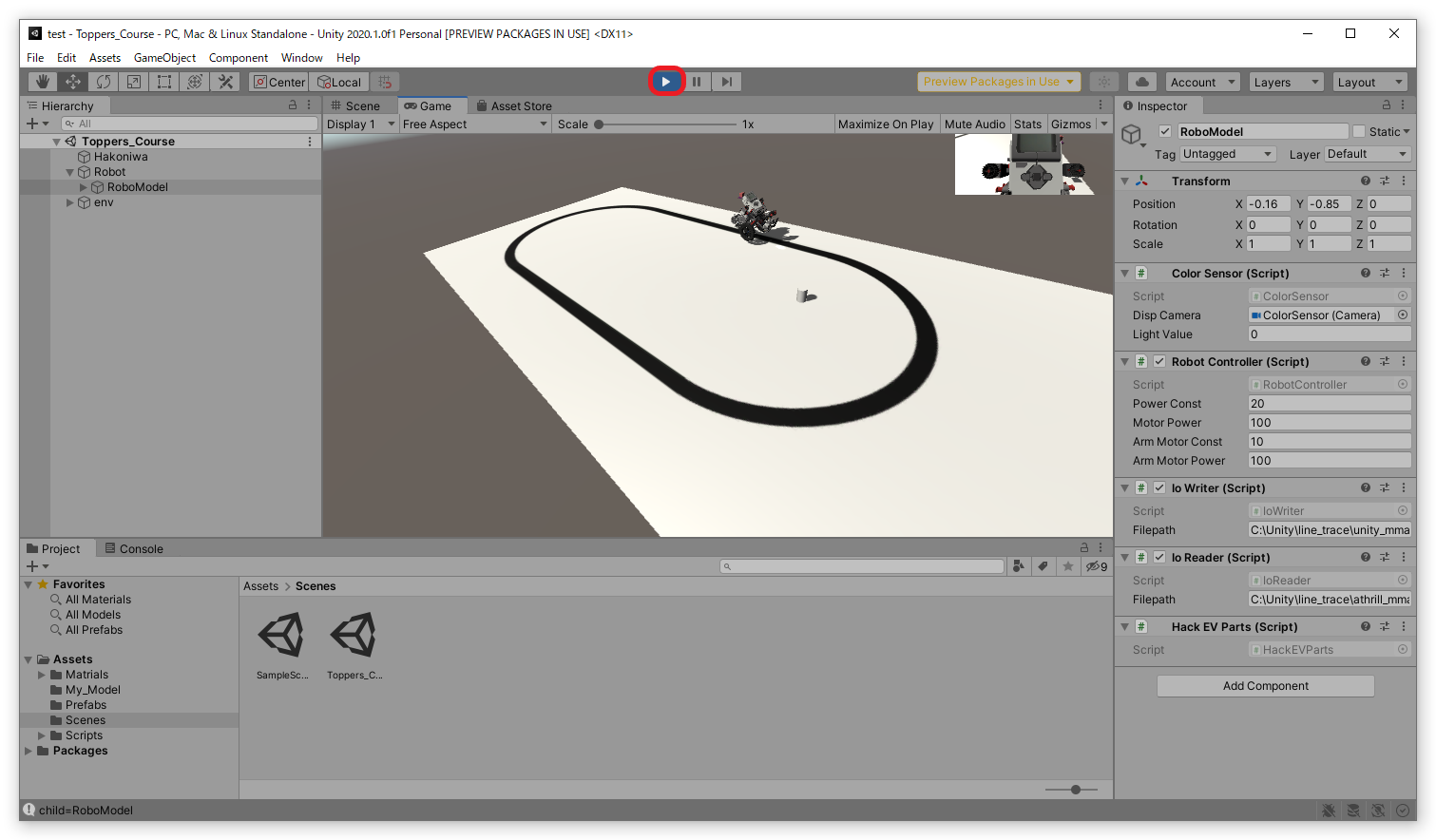
- Unityシミュレータの起動
- athrillより先にUnityを起動しなければ動きません。
- Unityの▶ボタン(下図参照)を押すと以下の画面に切り替わりシミュレーションモードになる。

- athrillの起動
- 最後に、端末で以下のコマンドを実行してathrillを実行する。
- 移動
$ cd ~/src/ev3rt-athrill-v850e2m/sdk/workspace/<プログラムディレクトリ>
- 実行
$ athrill2 -c1 -t -1 -m memory_mmap.txt -d device_config_mmap.txt ../asp
- 移動
- ライントレースの実行例
- ビルド
$ cd ~/src/ev3rt-athrill-v850e2m/sdk/workspace$ make img=line_trace clean$ make img=line_trace
- ファイルの変更
$ cd ~/src/ev3rt-athrill-v850e2m/sdk/workspace/line_trace- Unityがアクセスしているmmap.binとunity_mmap.binにathrillがアクセスできるようにエディタで
~/src/ev3rt-athrill-v850e2m/sdk/workspace/line_trace/memory_mmap.txtの下2行を以下のように変更する。
- ビルド
- 最後に、端末で以下のコマンドを実行してathrillを実行する。
ROM, 0x00000000, 512
RAM, 0x00200000, 512
RAM, 0x05FF7000, 10240
RAM, 0x07FF7000, 10240
MMAP, 0x40000000, /mnt/c/Unity/line_trace/athrill_mmap.bin
MMAP, 0x40010000, /mnt/c/Unity/line_trace/unity_mmap.bin
-
-
- athrillの実行
- $
athrill2 -c1 -t -1 -m memory_mmap.txt -d device_config_mmap.txt ../asp
- $
- 問題がなければ、ロボットが動き出しライントレースをする。Enjoy、箱庭!
- athrillの実行
-
以上

コメント