 lecture
lecture ROS演習7:ナビゲーションとアクションプログラム
この記事は私が金沢工業大学ロボティクス学科で担当している講義ロボットプログラミングⅡ用です。ROS演習6ではrvizを使いGUIでロボットを動かしましたが、今回はROSのActionLibを使ったアク...
 lecture
lecture 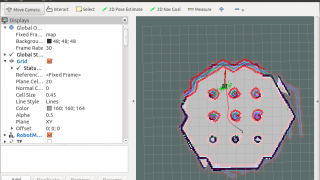 lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture