 lecture
lecture 物理エンジンODEで学ぶC言語 [STEP5:まとめ]
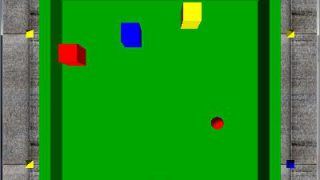
今回でこの講座は終わりです。先週作り始めたブロック崩し風ゲームを完成させましょう。この手のゲームで必要になることは、ボールがブロックの当たったときにブロックの消す処理です。このサンプルプログラムではブ...
lecture 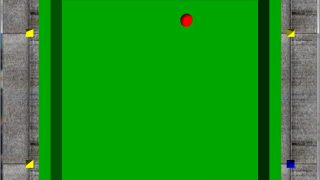 lecture
lecture  lecture
lecture  lecture
lecture 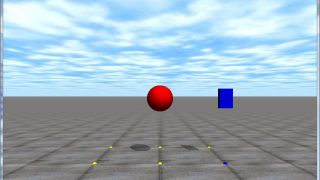 lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture 