 lecture
lecture HARD2020:軽量ROSパッケージpicottsを使った音声合成
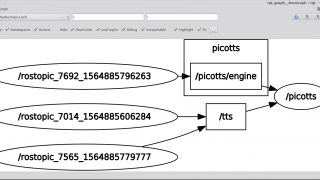
この記事はHARD2020(Home AI Robot Development)ワークショップ用です。オンライン、オフラインの色々な音声合成エンジンをサポートしているArnaud Rameyさんが開発...
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  education
education  education
education  lecture
lecture  lecture
lecture  education
education  education
education  education education
education education  education
education  education
education  education
education  education
education  education
education  education
education  education
education  education
education  lecture
lecture  lecture
lecture