 lecture
lecture ROS Melodic: シミュレータでTutlebot2 (Kobuki)を動かそう!
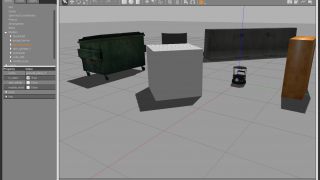
この記事はKobukiを使ったROS新人プログラム用の記事です。今回はシミュレータGAZEBOを使い、Kobuki(Turtlebot2)を動かします。 Simulator GAZEBOを動かそう次...
lecture 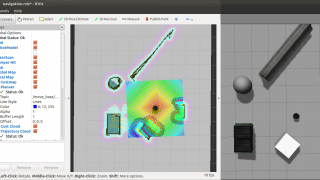 lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture 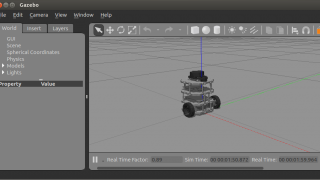 lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture 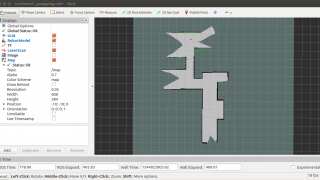 lecture
lecture 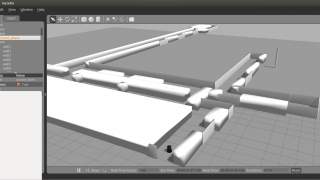 lecture
lecture  lecture
lecture  lecture
lecture 