 lecture
lecture PD実践2021:カラーセンサの使い方
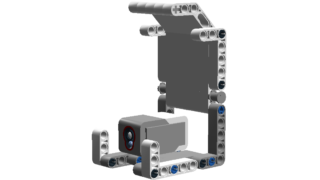
カラーセンサの使い方を学びます。 API ポート2のカラーセンサを初期化 ev3_sensor_config(EV3_PORT_2, COLOR_SENSOR); ポート2がカラーセンサであることを...
lecture 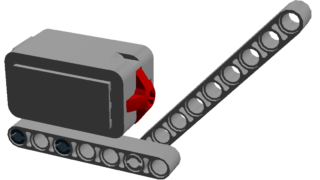 lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture lecture
lecture lecture  lecture
lecture  lecture
lecture  education
education  lecture
lecture  lecture
lecture 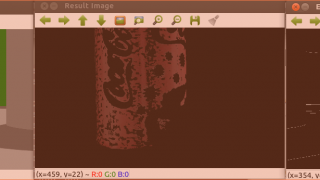 lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  education
education  education education education
education education education  lecture
lecture  lecture
lecture  HARD
HARD 