 robot
robot 金沢工業大学、産学連携でロボットが操作する次世代スライド棚の共同研究を開始
ICT教育ニュースにも出村研究室の取り組みが紹介されました.
robot robot  robot
robot  robot
robot  robot
robot  robot
robot  robot
robot 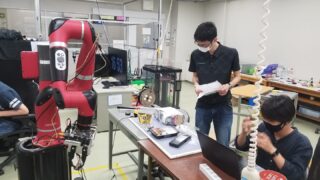 robot
robot  robot
robot  robot
robot  robot
robot  robot
robot  robot
robot  robot
robot  robot
robot  robot
robot  robot
robot  ROS2
ROS2  ROS2
ROS2  ROS2
ROS2  ROS2
ROS2 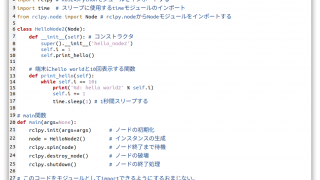 ROS2
ROS2  ROS2
ROS2  ROS2
ROS2  ROS2
ROS2  ROS2 lecture
ROS2 lecture  HARD
HARD  HARD
HARD  HARD
HARD