

新着順
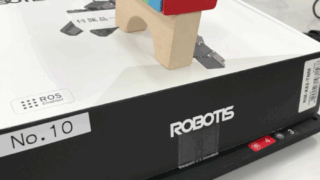
 専門実験2025ロボット制御Ⅰ:第1週 実習3 ピック&プレース: 実習3のデモプログラムarm_demo2024_ros2.pyを参考に積み木を積むピック&プレースのプログラムを作り,リアルロボットを使って積み木を2段重ねよう. 条 件 積み木の初期位置は任意とする.ただし,事前に積み […]2025-09-26
[387 views]
専門実験2025ロボット制御Ⅰ:第1週 実習3 ピック&プレース: 実習3のデモプログラムarm_demo2024_ros2.pyを参考に積み木を積むピック&プレースのプログラムを作り,リアルロボットを使って積み木を2段重ねよう. 条 件 積み木の初期位置は任意とする.ただし,事前に積み […]2025-09-26
[387 views]
 専門実験2025ロボット制御Ⅰ:第1週 実習2 プログラムでロボットを動かす方法 (ROS2): 今週の実習ではロボットアームとグリッパの開閉をプログラムで実現する方法を学びます。このデモプログラムを応用すると産業用ロボットで最もよく使われるピック&プレースを実現できます。 デモプログラムのダウンロードは下記のURL […]2025-09-26
[467 views]
専門実験2025ロボット制御Ⅰ:第1週 実習2 プログラムでロボットを動かす方法 (ROS2): 今週の実習ではロボットアームとグリッパの開閉をプログラムで実現する方法を学びます。このデモプログラムを応用すると産業用ロボットで最もよく使われるピック&プレースを実現できます。 デモプログラムのダウンロードは下記のURL […]2025-09-26
[467 views]
 専門実験2025ロボット制御Ⅰ:第1週 実習1 実機での操作(ROS2): 実習1:実機での操作 (ROS2) このページは以下のRobotis社e-manualにベースに作成したものです.以下の説明を良く読んで、そのとおり実習を進めてください。 OpenMANIPULATOR-X e-manu […]2025-09-26
[542 views]
専門実験2025ロボット制御Ⅰ:第1週 実習1 実機での操作(ROS2): 実習1:実機での操作 (ROS2) このページは以下のRobotis社e-manualにベースに作成したものです.以下の説明を良く読んで、そのとおり実習を進めてください。 OpenMANIPULATOR-X e-manu […]2025-09-26
[542 views]
 AIロボット入門2025:第1週 AIロボットをつくろう!: 金沢工業大学ロボティクス学科3年次2025年後学期開講のAIロボットプログラミング(2単位)の「第1週 AIロボットをつくろう!」のサポートページです。 教科書は、拙著「ROS2とPythonで作って学ぶAIロボット入門 […]2025-09-26
[399 views]
AIロボット入門2025:第1週 AIロボットをつくろう!: 金沢工業大学ロボティクス学科3年次2025年後学期開講のAIロボットプログラミング(2単位)の「第1週 AIロボットをつくろう!」のサポートページです。 教科書は、拙著「ROS2とPythonで作って学ぶAIロボット入門 […]2025-09-26
[399 views]
 Webots講座9-2025:PROTOファイル(アッカーマン・ビークル): Webots講座の9回目,最終回です.Webots講座4:自分の位置を知ろうでデッドレコニングを実装するハンズオンがありました.デッドレコニングを実装するには,そのロボットのホイールベースなどのパラメータがわらないと実装 […]2025-07-22
[871 views]
Webots講座9-2025:PROTOファイル(アッカーマン・ビークル): Webots講座の9回目,最終回です.Webots講座4:自分の位置を知ろうでデッドレコニングを実装するハンズオンがありました.デッドレコニングを実装するには,そのロボットのホイールベースなどのパラメータがわらないと実装 […]2025-07-22
[871 views]
 Webots講座8-2025:キーボード入力によるマニュアル運転: Webots講座の8回目です.引き続きWebotsの自動運転シミュレータを使っていきます.今回はキーボードによるマニュアル操作を導入します.これでゲームのように車を操作できますね. レファレンス Keyboard (Cy […]2025-07-22
[3,196 views]
Webots講座8-2025:キーボード入力によるマニュアル運転: Webots講座の8回目です.引き続きWebotsの自動運転シミュレータを使っていきます.今回はキーボードによるマニュアル操作を導入します.これでゲームのように車を操作できますね. レファレンス Keyboard (Cy […]2025-07-22
[3,196 views]
 Webots講座7-2025:LIDARを使った簡単な障害物回避: Webots講座の7回目です.引き続きWebotsの自動運転シミュレータを使っていきます.今回はLIDAR(Laser Detection and Ranging)センサの使い方とそれを使った簡単な障害物回避を実現します […]2025-07-22
[648 views]
Webots講座7-2025:LIDARを使った簡単な障害物回避: Webots講座の7回目です.引き続きWebotsの自動運転シミュレータを使っていきます.今回はLIDAR(Laser Detection and Ranging)センサの使い方とそれを使った簡単な障害物回避を実現します […]2025-07-22
[648 views]
 Webots講座6-2025:カメラを使った簡単な自動運転: Webots講座の6回目です.引き続きWebotsの自動運転シミュレータを使っていきます.今回はカメラセンサの使い方とそれを使った簡単な自動運転を実現します.コースの中央にある黄色ラインを追従するサンプルプログラムを紹介 […]2025-07-08
[759 views]
Webots講座6-2025:カメラを使った簡単な自動運転: Webots講座の6回目です.引き続きWebotsの自動運転シミュレータを使っていきます.今回はカメラセンサの使い方とそれを使った簡単な自動運転を実現します.コースの中央にある黄色ラインを追従するサンプルプログラムを紹介 […]2025-07-08
[759 views]
 Webots講座5-2025:スーパーバイザ・コントローラ: Webots講座の5回目です.引き続きWebotsの自動運転シミュレータを使っていきます.Webotsにはロボットを動作させるコントローラの他に,スーパーバイザ(Supervisor)コントローラがあります.スーパーバイ […]2025-07-08
[836 views]
Webots講座5-2025:スーパーバイザ・コントローラ: Webots講座の5回目です.引き続きWebotsの自動運転シミュレータを使っていきます.Webotsにはロボットを動作させるコントローラの他に,スーパーバイザ(Supervisor)コントローラがあります.スーパーバイ […]2025-07-08
[836 views]
 Webots講座4-2025:自分の位置を知ろう: Webots講座の4回目です.今回も前回に引き続き,Webotsの自動運転シミュレータを使います.BMW X5に搭載されているGPSを使い自分の位置(自己位置)を知る方法を学びます. レファレンス Webots for […]2025-07-08
[918 views]
Webots講座4-2025:自分の位置を知ろう: Webots講座の4回目です.今回も前回に引き続き,Webotsの自動運転シミュレータを使います.BMW X5に搭載されているGPSを使い自分の位置(自己位置)を知る方法を学びます. レファレンス Webots for […]2025-07-08
[918 views]
 Webots講座3-2025:自動運転シミュレータ: Webots講座の3回目です.今回は,Webotsの自動運転シミュレータを使ってBMW X5をPython言語により直進させるところまでを学びます.BMWのオーナーになった気分でやっていきましょう! レファレンス Web […]2025-06-29
[1,195 views]
Webots講座3-2025:自動運転シミュレータ: Webots講座の3回目です.今回は,Webotsの自動運転シミュレータを使ってBMW X5をPython言語により直進させるところまでを学びます.BMWのオーナーになった気分でやっていきましょう! レファレンス Web […]2025-06-29
[1,195 views]
 Webots講座2-2025:Pythonでプログラミングしよう!: Webots講座の2回目です.さっそく,Pythonを使ってロボットを動かしてみましょう. レファレンス Webots User Guide (Cyberbotics, Inc.) 環 境 Windows 11 Anac […]2025-06-29
[1,238 views]
Webots講座2-2025:Pythonでプログラミングしよう!: Webots講座の2回目です.さっそく,Pythonを使ってロボットを動かしてみましょう. レファレンス Webots User Guide (Cyberbotics, Inc.) 環 境 Windows 11 Anac […]2025-06-29
[1,238 views]
 Webots講座1-2025:インストールとデモの鑑賞: Webotsって何? さて,Webotsとは何でしょう?それは,Webotsはオープンソースでマルチプラットフォームのロボットシミュレータです.Webotsは1996年にスイス連邦工科大学のOliver Michel博士 […]2025-06-29
[1,217 views]
Webots講座1-2025:インストールとデモの鑑賞: Webotsって何? さて,Webotsとは何でしょう?それは,Webotsはオープンソースでマルチプラットフォームのロボットシミュレータです.Webotsは1996年にスイス連邦工科大学のOliver Michel博士 […]2025-06-29
[1,217 views]
 Ubuntu22.04.5:インストールと設定 (Let’s note CF-SR): Ubuntu22.04.5をLet’s note CF-SRにインストールと設定した備忘録。ここでは、WindowsがインストールされたSSDを約300GBと約200GBに分割して、後者にUbuntuをインス […]2025-06-15
[939 views]
Ubuntu22.04.5:インストールと設定 (Let’s note CF-SR): Ubuntu22.04.5をLet’s note CF-SRにインストールと設定した備忘録。ここでは、WindowsがインストールされたSSDを約300GBと約200GBに分割して、後者にUbuntuをインス […]2025-06-15
[939 views]
 ロボットプログラミング2025:第1週 オリエンテーション: このページは金沢工業大学ロボティクス学科ロボットプログラミングのサポートページです。第1週は授業で演習をするために必要なソフトウェアAnacondaのインストールとAnaconda promptの使い方のハンズオンとなり […]2025-04-08
[1,167 views]
ロボットプログラミング2025:第1週 オリエンテーション: このページは金沢工業大学ロボティクス学科ロボットプログラミングのサポートページです。第1週は授業で演習をするために必要なソフトウェアAnacondaのインストールとAnaconda promptの使い方のハンズオンとなり […]2025-04-08
[1,167 views]
 機械学習2025:第1週 オリエンテーション: このページは金沢工業大学ロボティクス学科機械学習のサポートページです。第1週は授業で演習をするために必要なソフトウェアAnacondaのインストールとJupyter Notebookの使い方のハンズオンとなります。 開発 […]2025-04-07
[991 views]
機械学習2025:第1週 オリエンテーション: このページは金沢工業大学ロボティクス学科機械学習のサポートページです。第1週は授業で演習をするために必要なソフトウェアAnacondaのインストールとJupyter Notebookの使い方のハンズオンとなります。 開発 […]2025-04-07
[991 views]
 拙著「ROS2とPythonで作って学ぶAIロボット入門 改訂第2版」2025年2月14日出版: 拙著「ROS2とPythonで作って学ぶAIロボット入門 改訂第2版」が2025年2月14日に出版されます。現在、Amazonで予約受付中です。大学や高専の授業、企業の新人研修やリスキリングの教科書にお使いの方は、初版か […]2025-01-25
[2,219 views]
拙著「ROS2とPythonで作って学ぶAIロボット入門 改訂第2版」2025年2月14日出版: 拙著「ROS2とPythonで作って学ぶAIロボット入門 改訂第2版」が2025年2月14日に出版されます。現在、Amazonで予約受付中です。大学や高専の授業、企業の新人研修やリスキリングの教科書にお使いの方は、初版か […]2025-01-25
[2,219 views]
 WRS FCSC2024で優勝したHappy Robotチームの動画公開!: WRS FCSC 2024 陳列サブタスクで2回とも満点を取った金沢工業大学出村研究室Happy Robotチームの動画を初公開します。おにぎりを9個同時に把持できる独自開発した機構が特徴です。同時に9個把持できたのは我 […]2024-11-27
[1,379 views]
WRS FCSC2024で優勝したHappy Robotチームの動画公開!: WRS FCSC 2024 陳列サブタスクで2回とも満点を取った金沢工業大学出村研究室Happy Robotチームの動画を初公開します。おにぎりを9個同時に把持できる独自開発した機構が特徴です。同時に9個把持できたのは我 […]2024-11-27
[1,379 views]
 金沢工大出村研究室Happy RobotチームがWRS FCSC 2024で悲願の断トツの初優勝!: 2024年11月11日から15日まで、インテックス大阪で開催された「WRS Future Convenience Store Challenge 2024(WRS FCSC 2024)」で、金沢工業大学ロボティクス学科出 […]2024-11-27
[1,811 views]
金沢工大出村研究室Happy RobotチームがWRS FCSC 2024で悲願の断トツの初優勝!: 2024年11月11日から15日まで、インテックス大阪で開催された「WRS Future Convenience Store Challenge 2024(WRS FCSC 2024)」で、金沢工業大学ロボティクス学科出 […]2024-11-27
[1,811 views]
 ロボットプログラミングⅡ-2024:ロボットビジョン3 – 深層学習による物体検出: この記事は金沢工業大学 ロボティクス学科で2024年後学期開講中のロボットプログラミングⅡ用です. 教科書「ROS2とPythonで作って学ぶAIロボット入門」(講談社)5章ビジョンの5.7.2節(p.180) 深層学習 […]2024-11-26
[1,145 views]
ロボットプログラミングⅡ-2024:ロボットビジョン3 – 深層学習による物体検出: この記事は金沢工業大学 ロボティクス学科で2024年後学期開講中のロボットプログラミングⅡ用です. 教科書「ROS2とPythonで作って学ぶAIロボット入門」(講談社)5章ビジョンの5.7.2節(p.180) 深層学習 […]2024-11-26
[1,145 views]
 ロボットプログラミングⅡ-2024:ロボットビジョン2– 基礎的な物体検出器を作ろう!: この記事は金沢工業大学 ロボティクス学科で2024年後学期開講中のロボットプログラミングⅡ用です. カメラから取得した画像データをOpenCVを使い画像処理することを学んだので、今回は物体検出のプログラムを作ってみましょ […]2024-11-26
[1,385 views]
ロボットプログラミングⅡ-2024:ロボットビジョン2– 基礎的な物体検出器を作ろう!: この記事は金沢工業大学 ロボティクス学科で2024年後学期開講中のロボットプログラミングⅡ用です. カメラから取得した画像データをOpenCVを使い画像処理することを学んだので、今回は物体検出のプログラムを作ってみましょ […]2024-11-26
[1,385 views]
 ロボットプログラミングⅡ-2024:ロボットビジョン1 – OpenCVとPythonプログラムで画像処理をしよう!: この記事は金沢工業大学 ロボティクス学科で2024年後学期開講中のロボットプログラミングⅡ用の資料を公開します。 今回は、コンピュータビジョンライブラリの定番OpenCVをROSで使うためにcv_bridgeを用いたPy […]2024-11-26
[1,609 views]
ロボットプログラミングⅡ-2024:ロボットビジョン1 – OpenCVとPythonプログラムで画像処理をしよう!: この記事は金沢工業大学 ロボティクス学科で2024年後学期開講中のロボットプログラミングⅡ用の資料を公開します。 今回は、コンピュータビジョンライブラリの定番OpenCVをROSで使うためにcv_bridgeを用いたPy […]2024-11-26
[1,609 views]
 専門実験2023ロボット制御Ⅰ: 本講義ではROS Noeticを使いOpenManipulator-Xとウェブカメラを使ったマニピュレーションの実験を実施します. 1週目 実習1:実機での操作 実習2:MoveIt! チュートリアル 実習3:プログラム […]2024-09-27
[1,312 views]
専門実験2023ロボット制御Ⅰ: 本講義ではROS Noeticを使いOpenManipulator-Xとウェブカメラを使ったマニピュレーションの実験を実施します. 1週目 実習1:実機での操作 実習2:MoveIt! チュートリアル 実習3:プログラム […]2024-09-27
[1,312 views]
 専門実験2023ロボット制御Ⅰ:第2週 実習1 ARマーカを用いたピック&プレース: 目次 概要使用製品開発環境使用するパッケージ実行方法ARマーカのピック&プレースサンプルプログラム印刷用マーカ付録①OpenManipulator-X座標軸②ウェブカメラのキャリブレーション目的手順1. キャリブ […]2024-09-27
[1,642 views]
専門実験2023ロボット制御Ⅰ:第2週 実習1 ARマーカを用いたピック&プレース: 目次 概要使用製品開発環境使用するパッケージ実行方法ARマーカのピック&プレースサンプルプログラム印刷用マーカ付録①OpenManipulator-X座標軸②ウェブカメラのキャリブレーション目的手順1. キャリブ […]2024-09-27
[1,642 views]
 専門実験2023ロボット制御Ⅰ:第1週 実習4ピック&プレース: リアルロボット 実習3のデモプログラムarm_demo2.pyを参考に積み木を積むピック&プレースのプログラムを作り,リアルロボットを使って積み木を2段重ねよう. 条 件 積み木の初期位置は任意とする.ただし,事前に積み […]2024-09-27
[1,099 views]
専門実験2023ロボット制御Ⅰ:第1週 実習4ピック&プレース: リアルロボット 実習3のデモプログラムarm_demo2.pyを参考に積み木を積むピック&プレースのプログラムを作り,リアルロボットを使って積み木を2段重ねよう. 条 件 積み木の初期位置は任意とする.ただし,事前に積み […]2024-09-27
[1,099 views]