 lecture
lecture 物理エンジンODEで学ぶC言語2017 [STEP3:関数]動力学計算
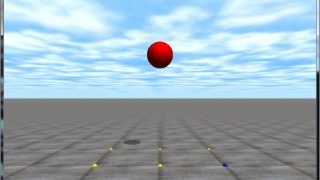
ODEで学ぶC言語のStep3です.今回は私がODEのAPIを元に作成した関数を使い,赤い球を落下させるプログラムを説明します.今までのプログラムでは描画だけでしたが,今回からシミュレーションやゲーム...
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture lecture lecture lecture
lecture lecture lecture lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture 