 lecture
lecture ROS演習4:トピックで通信しよう!
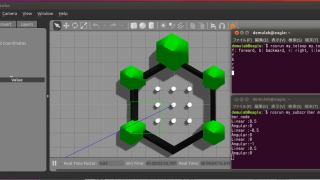
この記事は私が金沢工業大学ロボティクス学科で担当している講義ロボットプログラミングⅡ用です。今回はROSの通信方式であるトピックを学びます。1. Publisherキーボードからロボットを操縦するmy...
lecture  robocup
robocup  未分類
未分類  未分類 未分類
未分類 未分類  つくばチャレンジ
つくばチャレンジ  lecture
lecture  lecture
lecture  lecture
lecture  robocup@home
robocup@home  lecture
lecture  robocup@home
robocup@home 