
RoboCup Japan Open 2017: KIT Happy Robot 3位入賞! (2018-5-6) - ロボカップジャパンオープン2017大垣が終了しました。夢考房RoboCup@Homeプロジェクトとロボティクス学科出村研究室の合同チームKIT Happy Robotはオープンプラットフォームリーグ(OPL)で3位入賞し […]
YOLO V3に変身!? (2018-4-14) - TEDにも登場したリアルタイム物体検出DNN(Deep Neural Network)のYOLOがVersion 3にバージョンアップしYOLO V3に変身したので試したときのメモ。仮面ライダーみたいに大幅にバージョンア […]
コンピュータ工学Ⅰ (2018-4-3) - 第1までに以下のホームワークをやってこよう! 次のソフトウェアを次週までにインストールしよう。 開発環境のインストール 次のソフトウェアをダウンロードして解凍しよう。 gtypist(学内のみインストール可) 以上
 Turtlebot3: 4. 動かそう! (2018-4-1) - では、Turtlebot3を動かしてみよう! 以下のリモートPC、Raspberry Pi3、OpenCRの設定が終わっているものとします。 Turtlebot3: リモートPCの設定 Turtlebot3: Raspb […]
Turtlebot3: 4. 動かそう! (2018-4-1) - では、Turtlebot3を動かしてみよう! 以下のリモートPC、Raspberry Pi3、OpenCRの設定が終わっているものとします。 Turtlebot3: リモートPCの設定 Turtlebot3: Raspb […]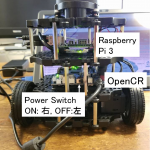 Turtlebot3: 3. OpenCRの設定 (2018-4-1) - Turtleobot3に搭載されているコントローラOpenCR1.0の設定メモ。このコントローラはオープンハードウェア&ソフトウェアで、ROSを使った組み込み向けに作られており、開発環境はArduino、Scratchか […]
Turtlebot3: 3. OpenCRの設定 (2018-4-1) - Turtleobot3に搭載されているコントローラOpenCR1.0の設定メモ。このコントローラはオープンハードウェア&ソフトウェアで、ROSを使った組み込み向けに作られており、開発環境はArduino、Scratchか […]Turtlebot3: 2. Raspberry Pi 3の設定 (2018-4-1) - Turtlebot3 Burgerに搭載されているRaspberry Pi 3の設定メモ。以下のリンクを元に作業したメモ。この作業も1.2GB以上のファイルをダウンロードする必要があるので、環境によっては数時間かかる。 […]
Turtlebot3: 1. リモートPCの設定 (2018-4-1) - Turtlebot3を動かすためのリモートPCの設定メモ。RobotisからEマニュアルが出ているが、日本語訳がなくわかりづらいのでメモを残す。 Turtlebot3 e-Manual, ROBOTIS Turtleb […]
Turtlebot3: チュートリアルというか防備録。 (2018-4-1) - ROBOTISのe-Manualをベースにしたチュートリアルというか防備録。 リモートPCの設定 Raspberry Pi3の設定 OpenCRの設定 動かそう! 続く…
PCL: VFH Descriptorを使ったソースコードでsegmentation fault (2018-3-26) - VHF (Viewpoint Feature Histogram) descriptorsを使ったvfh_recognition_node.cppでsegmentation faultのエラーを解決するために数日悩んだの […]
CMakeLists.txtでC++11のサポート (2018-3-11) - CMakeLists.txtでC++11をサポートする方法メモ 環境: ROS Kinetic, Ubuntu 16.04, gcc 5.4.0 エラー: /home/demulab/catkin_ws/src/ta […]
共同研究第1号 自律AGV (2018-3-2) - 金沢エンジニアリングシステムズさんとの共同研究の成果となる自律AGV (Autonomous Ground Vehicle) ! demura.netでは今年度から企業との共同研究をスタートさせた記念すべき第1号です。こ […]
RealSense D435 ファームウェアアップデート (2018-3-2) - RealSense D435 ファームウェアを5.08.15.0から5.9.2.0にアップデートした。 ここから、ファームウェアアップデートツール(Windows10 64bit)と最新のファームウェアをダウンロードして […]
Kinect V1 三脚アダプタ (2018-3-2) - 未だにKinect V1を使っている。Kinect V1を三脚に固定するための便利なグッズをアマゾンで見つけたのでメモしておく。元来はスマホ用だがサイズ的にKinect V1の台座にピッタリはまる。同じようなものがあるが […]
RealSense D435 パラメータの動的設定 (Dynamic Reconfigure) (2018-2-2) - RealSense D435のカメラ画像が暗かったので、ROSのDynamic Reconfigureを使いパラメータを調整した。 roslaunch realsense_ros_camera rs_camera.lau […]
 ros_caffe: ROSとCaffeの連携 (2018-1-31) - ROSでCaffeを使うためにros_caffeパッケージをインストールしたときのメモ。このパッケージはカメラから画像トピックをcaffeで識別して、トピック/caffe_retをパブリッシュする。ros_caffeパッ […]
ros_caffe: ROSとCaffeの連携 (2018-1-31) - ROSでCaffeを使うためにros_caffeパッケージをインストールしたときのメモ。このパッケージはカメラから画像トピックをcaffeで識別して、トピック/caffe_retをパブリッシュする。ros_caffeパッ […]Deep Learning用PC環境設定メモ (Xubuntu16.04.1, Cuda8.0) (2018-1-21) - Deep Learning用に購入したマシンにxubuntu16.04.1, Cuda8.0をインストールしたときのメモ。まず、xubuntu16.04.3をDVDからインストールしようとしたが次のエラーでインストールで […]
Open Detectionのインストール (2018-1-8) - Open Detectionをインストールしたときのメモ。Open DetectoinはGoogle Summer of Code 2015 の成果を元に開発され、目的はロボット用のビジョンツール。2016年5月から更新 […]
 UBUNTU16.04: PCL1.8.0のインストール (2018-1-8) - PCL1.8.0をソースからインストールしたときのメモ。 環境 CPU: Intel(R) Core(TM) i7-8700K CPU @ 3.70GHz (6 core) GPU: NVIDIA GTX 1080Ti […]
UBUNTU16.04: PCL1.8.0のインストール (2018-1-8) - PCL1.8.0をソースからインストールしたときのメモ。 環境 CPU: Intel(R) Core(TM) i7-8700K CPU @ 3.70GHz (6 core) GPU: NVIDIA GTX 1080Ti […]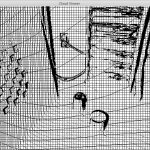 PCL: Kinect V2からのポイントクラウドを取得し保存するコードと方法 (2017-12-31) - Kinect からのポイントクラウドを取得し保存するコードと方法 Kinect V2を使い、ポイントクラウドと画像を表示、保存するコード。 PLCVisualizerのTutorialと産総研の金崎さんのGithubも考 […]
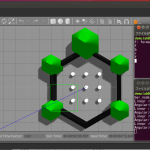
PCL: Kinect V2からのポイントクラウドを取得し保存するコードと方法 (2017-12-31) - Kinect からのポイントクラウドを取得し保存するコードと方法 Kinect V2を使い、ポイントクラウドと画像を表示、保存するコード。 PLCVisualizerのTutorialと産総研の金崎さんのGithubも考 […]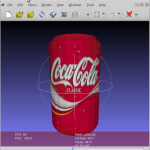 PCL: 3Dモデル(obj)からPCDフォーマットへの変換法 (2017-12-29) - meshlabを使った3DモデルからPCLで使うPCDフォーマットへの変換法メモ。 3Dモデルの準備 plyまたはobj形式の3Dモデルを用意する。次のサイトからコーラ缶の3Dモデルcolladaフォーマットでダウンロー […]
PCL: 3Dモデル(obj)からPCDフォーマットへの変換法 (2017-12-29) - meshlabを使った3DモデルからPCLで使うPCDフォーマットへの変換法メモ。 3Dモデルの準備 plyまたはobj形式の3Dモデルを用意する。次のサイトからコーラ缶の3Dモデルcolladaフォーマットでダウンロー […]Ubuntu16.04: Caffe-0.15、tensorflow-1.4.1とDigits6.0のインストール (2017-12-27) - Ubuntu16.04にCaffe-0.15、TensorFlow-1.4.1とDIGITS6.0を入れたときのメモ Caffe-0.15のインストール 準備:Protbuf3をソースからインストール。バイナリだとDig […]
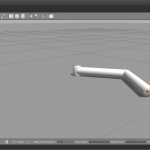 ROS演習10:ロボットアームと位置センサ (2017-12-8) - 今回は先回作った2自由度のロボットアームの先端に位置センサを取り付け、先端位置を取得するプログラムを作ります。 位置センサ用プラグインの追加 gazeboのロボットモデルに位置センサを取り付けるために、~/catkin_ […]
ROS演習10:ロボットアームと位置センサ (2017-12-8) - 今回は先回作った2自由度のロボットアームの先端に位置センサを取り付け、先端位置を取得するプログラムを作ります。 位置センサ用プラグインの追加 gazeboのロボットモデルに位置センサを取り付けるために、~/catkin_ […]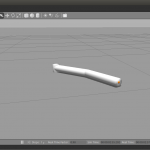 ROS演習9:ロボットアーム (2017-12-8) - 今週はgazeboを使い2自由度のロボットアームを作り、関節を動かします。2自由度ロボットアームのURDFは参考リンクを参照してください。このサンプルでは参考リンクのrrbot.xacroをベースに作っています。 ソース […]
ROS演習9:ロボットアーム (2017-12-8) - 今週はgazeboを使い2自由度のロボットアームを作り、関節を動かします。2自由度ロボットアームのURDFは参考リンクを参照してください。このサンプルでは参考リンクのrrbot.xacroをベースに作っています。 ソース […]ROS演習8:ロボットビジョン (OpenCVとの連携) (2017-12-5) - 2018-1-21:OpenCV関連でエラーが出る場合に対応しました。再度、準備、インストール、実行を試してください。 2017-12-13:授業時に「3. うまく実行できない場合 (4)」を実行すると「許可がありません […]
ROS演習7:ナビゲーションとアクションプログラム (2017-12-5) - この記事は私が金沢工業大学ロボティクス学科で担当している講義ロボットプログラミングⅡ用です。ROS演習6ではrvizを使いGUIでロボットを動かしましたが、今回はROSのActionLibを使ったアクションプログラムを学 […]
 RobotVision勉強会6:ノイズ除去 (2017-11-30) - RobotVision勉強会第6回の内容メモです。開発環境はUbuntu16.04、OpenCV3.2.0です。第6回は膨張、収縮を使ったノイズ除去です。これはとても良く使います。C++言語とOpenCV APIで実装し […]
RobotVision勉強会6:ノイズ除去 (2017-11-30) - RobotVision勉強会第6回の内容メモです。開発環境はUbuntu16.04、OpenCV3.2.0です。第6回は膨張、収縮を使ったノイズ除去です。これはとても良く使います。C++言語とOpenCV APIで実装し […]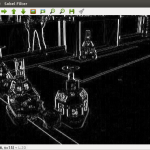 RobotVision勉強会5: フィルタ処理 (2017-11-30) - RobotVision勉強会第5回の内容メモです。開発環境はUbuntu16.04、OpenCV3.2.0です。第5回はフィルタ処理です。平滑化フィルタとソーベルフィルタをC++言語とOpenCV APIで […]
RobotVision勉強会5: フィルタ処理 (2017-11-30) - RobotVision勉強会第5回の内容メモです。開発環境はUbuntu16.04、OpenCV3.2.0です。第5回はフィルタ処理です。平滑化フィルタとソーベルフィルタをC++言語とOpenCV APIで […]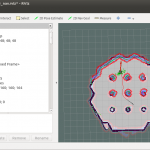 ROS演習6:地図作成・自己位置推定(SLAM, AMCL) (2017-11-28) - この記事は私が金沢工業大学ロボティクス学科で担当している講義ロボットプログラミングⅡ用です。今回は地図作成(SLAM)と自己位置推定(AMCL)のパッケージを使いロボットにナビゲーションをさせましょう! 本記事を以下の記 […]
ROS演習6:地図作成・自己位置推定(SLAM, AMCL) (2017-11-28) - この記事は私が金沢工業大学ロボティクス学科で担当している講義ロボットプログラミングⅡ用です。今回は地図作成(SLAM)と自己位置推定(AMCL)のパッケージを使いロボットにナビゲーションをさせましょう! 本記事を以下の記 […]Deep Learning用PC環境設定メモ (Xubuntu16.04.1, Cuda9.0) (2017-11-27) - Deep Learning用に購入したマシンにxubuntu16.04.1, Cuda9.0をインストールしたときのメモ。まず、xubuntu16.04.3をDVDからインストールしようとしたが次のエラーでインストールで […]
ROS演習5:サービスを使って双方向通信しよう! (2017-11-12) - この記事は私が金沢工業大学ロボティクス学科で担当している講義ロボットプログラミングⅡ用です。今回はROSの通信のもう一つの通信方式であるサービスを理解しましょう。次のROS Wikiを参考にしています。 C++でシンプル […]
 ROS演習4:トピックで通信しよう! (2017-11-10) - この記事は私が金沢工業大学ロボティクス学科で担当している講義ロボットプログラミングⅡ用です。今回はROSの通信方式であるトピックを学びます。 1. Publisher キーボードからロボットを操縦するmy_teleopパ […]
ROS演習4:トピックで通信しよう! (2017-11-10) - この記事は私が金沢工業大学ロボティクス学科で担当している講義ロボットプログラミングⅡ用です。今回はROSの通信方式であるトピックを学びます。 1. Publisher キーボードからロボットを操縦するmy_teleopパ […]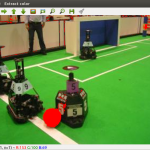 RobotVision勉強会:第4回 マウスイベント処理 (2017-11-9) - この記事は私が主催しているRobotVision勉強会の内容メモです。OpenCVの内容については下のサイトやOpenCV3.2.0のドキュメントを参考にしています。なお、開発環境はUbuntu16.04、 […]
RobotVision勉強会:第4回 マウスイベント処理 (2017-11-9) - この記事は私が主催しているRobotVision勉強会の内容メモです。OpenCVの内容については下のサイトやOpenCV3.2.0のドキュメントを参考にしています。なお、開発環境はUbuntu16.04、 […]つくばチャレンジ2017: 過去最高850m走行 (2017-11-7) - つくばチャレンジ2017が終了しました。研究室としては2008年から参加し、今年は過去最高の850mを走行しました。これも参加した学生の努力の成果です。初参加の2008年は私と学生2名のたった3名で走行距離もわずか3mで […]
JetsonTX2: 高速化 (2017-10-27) - Jetson TX2を高速化するためのメモ 以下のコマンドで全6コアが動いているか確認する。 $ sudo cat /sys/devices/system/cpu/cpu*/online 以下のコマンドを実行すると全コア […]
 RobotVision勉強会:第3回 カメラ・動画の読込みと画素へのアクセス (2017-10-19) - この記事は私が主催しているRobotVision勉強会の内容メモです。OpenCVの内容については下のサイトやOpenCV3.2.0のドキュメントを参考にしています。なお、開発環境はUbuntu16.04、OpenCV3 […]
RobotVision勉強会:第3回 カメラ・動画の読込みと画素へのアクセス (2017-10-19) - この記事は私が主催しているRobotVision勉強会の内容メモです。OpenCVの内容については下のサイトやOpenCV3.2.0のドキュメントを参考にしています。なお、開発環境はUbuntu16.04、OpenCV3 […]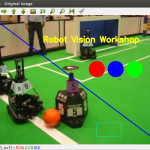 RobotVision勉強会:第2回 色による物体抽出 (2017-10-12) - この記事は私が主催しているRobotVision勉強会の内容メモです。OpenCVの内容については下のサイトやOpenCV3.2.0のドキュメントを参考にしています。なお、開発環境はUbuntu16.04、OpenCV3 […] RobotVision勉強会:1回目 画像の読込・表示・保存 (2017-10-9) - この記事は私が主催しているRobotVision勉強会の内容メモです。OpenCVの内容については下のサイトやOpenCV3.2.0のドキュメントを参考にしています。なお、開発環境はUbuntu16.04、OpenCV3 […]
RobotVision勉強会:第2回 色による物体抽出 (2017-10-12) - この記事は私が主催しているRobotVision勉強会の内容メモです。OpenCVの内容については下のサイトやOpenCV3.2.0のドキュメントを参考にしています。なお、開発環境はUbuntu16.04、OpenCV3 […] RobotVision勉強会:1回目 画像の読込・表示・保存 (2017-10-9) - この記事は私が主催しているRobotVision勉強会の内容メモです。OpenCVの内容については下のサイトやOpenCV3.2.0のドキュメントを参考にしています。なお、開発環境はUbuntu16.04、OpenCV3 […]Ubuntu16.04: OpenCV3.2.0インストール (2017-10-4) - Ubuntu16.04にOpenCV3.2.0をソースからビルドしインストールしたときのメモ。以下のサイト等を参考にした。なお、OpenCV3.3.0は以下の手順ではエラーが出てビルドができないので注意。 Just a […]
ロボットプログラミングⅡ-2017:環境設定 (2017-10-3) - この記事は私が担当している講義ロボットプログラミングⅡ用です。 ロボットプログラミングⅡでは、フレームワークとしてROSロボットシミュレータとしてGAZEBOを使用します。インストールは次の手順です。Panasonic […]
ロボットプログラミングⅡ:Ubuntu16.04ウインドウマネージャーの設定 (2017-10-3) - この記事は私が担当している講義ロボットプログラミングⅡ用です。 Ubuntu16.04の標準WindowマネージャーUnityは動作が重いので、動作が軽快なUbuntu Flashback(Metacity)に変更します […]
ロボットプログラミングⅡ:Ubuntu16.04のネットワーク設定 (2017-10-3) - この記事は私が担当している講義ロボットプログラミングⅡ用です。 VirtualBox5.1にインストールしたUbuntu16.04でのネットワーク設定を説明します。 ○ ネットワーク設定 (1) 画面左下の「システム設定 […]
ロボットプログラミングⅡ:ROS Kineticのインストール (2017-10-2) - 私が担当している授業のロボットプログラミングⅡ用です.この記事はROS のオフィシャルウェブサイトの次の日本語記事を簡略化しています。詳しい説明は次のリンクをご覧ください。 ROS Kinetic の Ubuntu への […]
ロボットプログラミングⅡ:VirtualBox 5.1の設定 (2017-10-1) - この記事は私が担当している講義ロボットプログラミングⅡ用です。 この記事では、快適に使うためにVirtualBox5.1の設定を行います。 ○ VirtualBoxの設定 (1) VirtualBoxを起動し、「設定」を […]
ロボットプログラミングⅡ:Virtualbox5.1+Ubuntu16.04のインストール法 (2017-10-1) - この記事は私が担当している講義ロボットプログラミングⅡ用です。 ここでは、Virtualbox5.1+Ubuntu16.04のインストール法を説明します。 ○ VirtualBoxのインストール (1) VirtualB […]
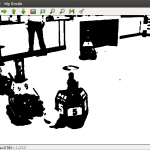
 rosbagのイメージデータをyoloで物体検出 (2017-9-30) - rosbagで保存したイメージデータをyoloで物体検出した作業のメモ。上と下の写真はつくばチャレンジ実験走行で探索対象を検出したときのスクリーンショット。マネキンもpersonと検出するので実験走行に使える。。。 環 […]
rosbagのイメージデータをyoloで物体検出 (2017-9-30) - rosbagで保存したイメージデータをyoloで物体検出した作業のメモ。上と下の写真はつくばチャレンジ実験走行で探索対象を検出したときのスクリーンショット。マネキンもpersonと検出するので実験走行に使える。。。 環 […]ビデオカメラで撮影した動画をOpenCVで読み込み表示 (2017-9-30) - SonyのビデオカメラHandycam HDR-CX720で撮影した動画mtsフォーマットをOpenCVで読み込んだときのメモ。環境はUbuntu16.04, OpenCV3.2, gcc5.4。 そのビデオカメラで撮影 […]
Ubuntu16.04: Kinect V2の設定 (2017-9-10) - Ubuntu16.04.2でKinect V2の設定したときのメモ libfreenect2のインストール cd mkdir src cd src git clone https://github.com/OpenKin […]
Turtlebot3: 組み立て (2017-8-26) - Turtlebot3 Burgerの組み立てメモ。組み立てマニュアルがレゴのように図で説明しているのでとてもわかりやすい。中学生以上なら問題なく組み立てられる。ゆっくり作業したので所要時間約2時間。早い人なら1時間もあれ […]
 物理エンジンODEで学ぶC言語 [STEP5:終わり] ジョイントの生成と制御 (2017-7-6) - ODEで学ぶC言語のStep5です.Step4でエアーホッケー風ゲームは終わりましたが、要望の多かったジョイントの使い方と制御を説明します。補講となります。 ジョイントは我々の周りでは、折畳み […]
物理エンジンODEで学ぶC言語 [STEP5:終わり] ジョイントの生成と制御 (2017-7-6) - ODEで学ぶC言語のStep5です.Step4でエアーホッケー風ゲームは終わりましたが、要望の多かったジョイントの使い方と制御を説明します。補講となります。 ジョイントは我々の周りでは、折畳み […]物理エ物理エンジンODEで学ぶC言語2017 [STEP4:構造体]力とトルクの与え方 (2017-6-30) - エアーホッケー風ゲームを作ろう! 物理エンジンで学ぶC言語のStep4です.今回は構造体と物体へ力やトルクを加える方法,さらにシミュレーションのリセット法などを学びます.構造体の概要については既にわかっているものとし,サ […]