 lecture
lecture ROS演習7-2018:地図作成・自己位置推定(SLAM, AMCL)
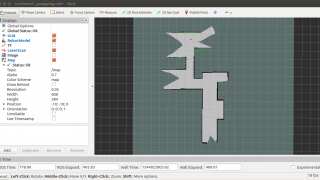
この記事は私が金沢工業大学ロボティクス学科で担当している2018年度後学期開講の講義ロボットプログラミングⅡ用です。今回は地図作成(SLAM)と自己位置推定(AMCL)のパッケージを使いロボットにナビ...
lecture 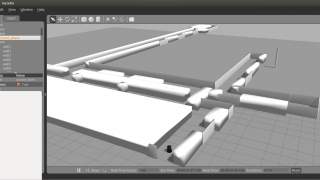 lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture 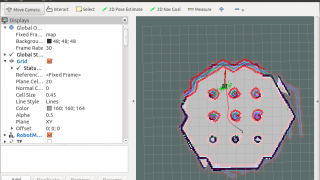 lecture
lecture  lecture
lecture 