この記事は2018年度に私が担当している講義ロボットプログラミングⅡ用です。
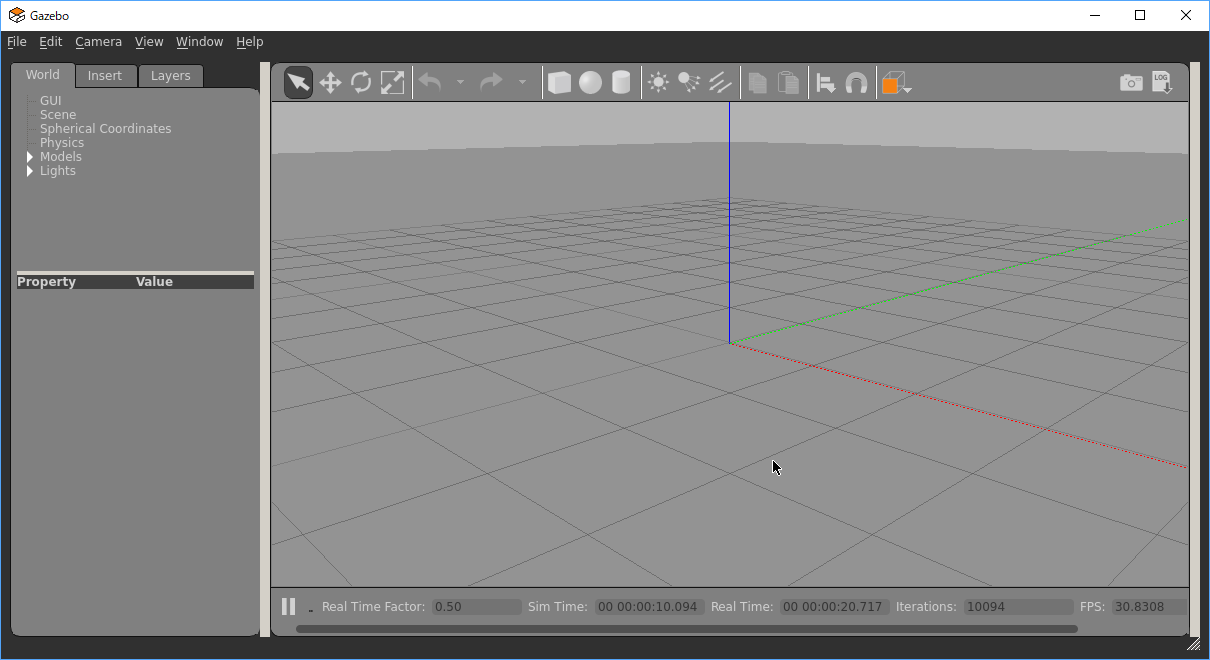
ロボットプログラミングⅡでは、フレームワークとしてROSロボットシミュレータとしてGAZEBOを使用します。インストールは次の以下の手順です。Razer Blade 15 (OS:Windows 10 ホーム1803, CPU:Core i7, GPU:NVIDIA 1070 MAXQ, Memory:16GB)で試しています。
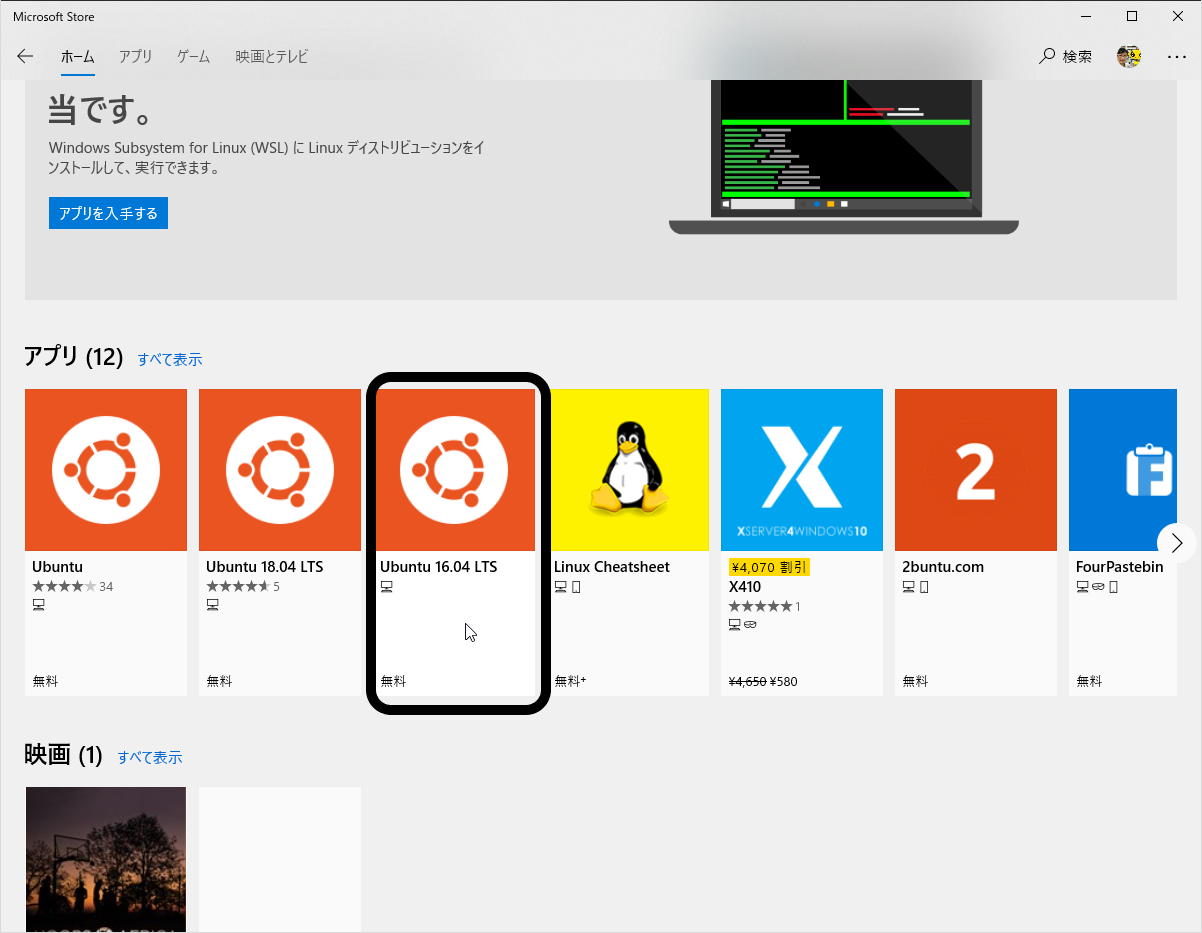
では、以下のリンクに従って第3週の授業までに作業を進めてください。Windows Subsystem for LinuxにUbuntu16.04をインストールしたあとに、ROSのインストールまで行います。

終わり

コメント