 lecture
lecture ROS2ハンズオン3-3:地図を作ろう!
今回は,SLAMを使って地図を作成します.教科書 のに相当します. ROS2 Foxyの標準SLAMパッケージはslam_toolboxです.この使い方についてざっと学びます.詳しい使い方は参考リンク...
lecture  lecture
lecture  education education education
education education education  education
education  education
education  education
education  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture education education
lecture education education  AIロボット入門
AIロボット入門  education
education  education
education 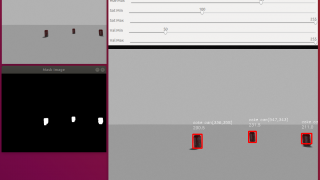 education
education  education
education 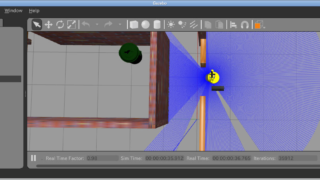 AIロボット入門
AIロボット入門 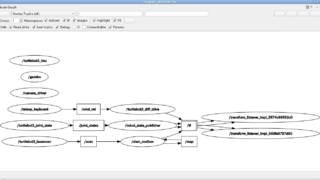 AIロボット入門
AIロボット入門  education education
education education