 education
education 仮想シミュレーション環境「箱庭」の使い方
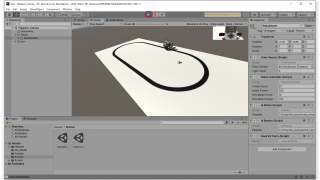
仮想シミュレーション環境「箱庭」V850版の使い方を説明する。ここでは授業で使用する通信方式MMAP版の説明だけを行う。UDP版はオリジナルである参考サイトを参照されたい。 参考サイト TOPPERS...
education  education
education  lecture
lecture  lecture
lecture  education
education  education
education  education
education  education
education  education
education  education education
education education  education
education  education
education  education
education  education
education  education
education  education
education  education
education  education
education  education
education  education
education  education education
education education  education
education  education education
education education  education education
education education  education
education  education
education