 HARD
HARD HARD2021:ワークショップに必要な知識とスキルの勉強法
HARD2021ワークショップに必要な知識とスキルの勉強法を紹介します。ROSのお勉強だけは必須です。後は、必要に応じて取り組んでください。 ROSのお勉強 習得に要する期間:1週〜2週間 ROS T...
HARD  HARD
HARD  misc
misc 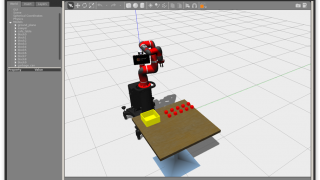 robot
robot 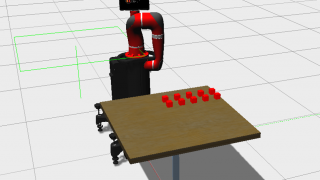 robot robot
robot robot  robot
robot  robot
robot  robot
robot  robot
robot  deeplearning
deeplearning  deeplearning
deeplearning  robot
robot  HARD
HARD  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  education
education  education
education  education
education  education
education  robot
robot 