 lecture
lecture Webots講座8-2023:キーボード入力によるマニュアル運転(Python)
Webots講座の8回目です.引き続きWebotsの自動運転シミュレータを使っていきます.今回はキーボードによるマニュアル操作を導入します.これでゲームのように車を操作できますね. レファレンス Ke...
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture 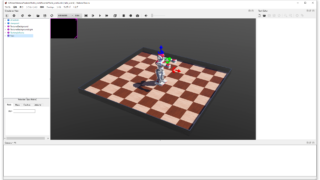 lecture
lecture  lecture
lecture  robocup@home
robocup@home  lecture
lecture  robocup@home
robocup@home  robocup@home
robocup@home  robocup@home
robocup@home  robocup@home
robocup@home  education education AIロボット入門
education education AIロボット入門  AIロボット入門
AIロボット入門  education
education  robocup@home
robocup@home  education
education  education
education  education AIロボット入門
education AIロボット入門  AIロボット入門
AIロボット入門 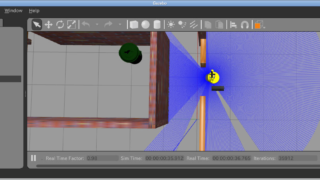 AIロボット入門
AIロボット入門  AIロボット入門 education education
AIロボット入門 education education  education
education