 lecture
lecture PD実践2021:第1週 ガイダンス・開発環境のインストール
1週目(9/25):ガイダンス・開発環境のインストール 担当教員、TA、SAの紹介(講義室) 授業の概要説明(講義室) 本資料の説明 ETロボコンの説明 PD実践:LEGO Mindstorms EV...
 lecture
lecture 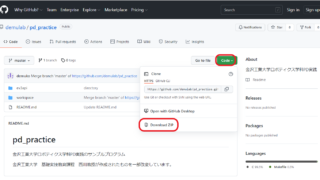 lecture
lecture 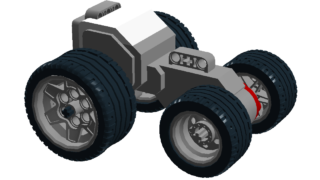 lecture
lecture 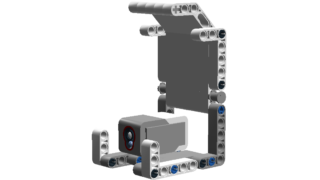 lecture
lecture 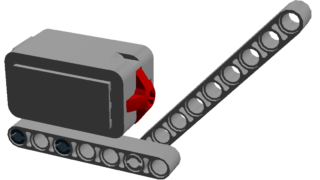 lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture lecture
lecture lecture  lecture
lecture  lecture
lecture  education
education  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture