 lecture
lecture WSL: WindowsからUbuntuのファイルへアクセス
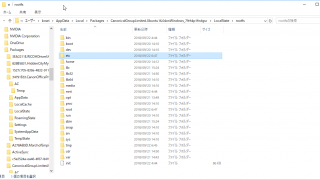
\\wsl$でUbuntuにアクセスできるようになりました。この記事は古いです。(Windows Subsystem for Linux)でWLSからWindowsのファイルへアクセスするのは、/mn...
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture 