 lecture
lecture ロボットプログラミングⅡ-2016 環境設定
この記事は私が担当している講義ロボットプログラミングⅡ用です。 ロボットプログラミングⅡでは、フレームワークとしてROSロボットシミュレータとしてGAZEBOを使用します。インストールは次の手順です。...
 lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture 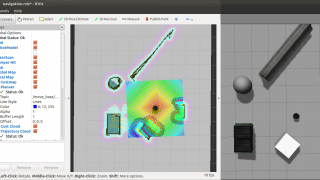 lecture
lecture 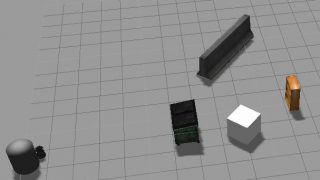 lecture
lecture 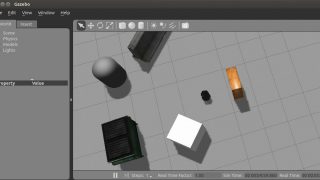 lecture
lecture 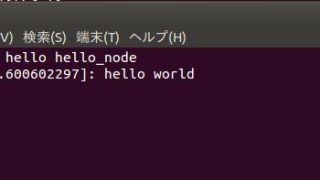 lecture
lecture  lecture
lecture