
ODE0.11.1のインストール法を説明します.今回は一番ユーザが多いと思われるWindows VistaとVisual C++ 2008 Expression Editionを使った場合です.
- A. Visual C++ 2008 Expression Editionのインストール
- B. ODEのダウンロード
- C. ODEのインストール
- D. ODE本のサンプルプログラムをビルドする方法
- A. Visual C++ 2008 Expression Editionのインストール
- B. ODEのダウンロード
- ode-0.11.1.zipをダウンロードし,デスクトップへ保存する.
- 解凍ソフトの準備(持っていない方のみ)
- ode-0.10.1.zipはzipフォーマットで圧縮されていますのでzipを解凍できるソフトウェアをインストールしてください.ここでは,私が愛用しているLhaplusという圧縮・解凍ソフトを使います.GoogleでLhaplusを検索するとダウンロード先を簡単に見つけることができます.
- 解凍と移動
- デスクトップにあるode-0.11.1.zipをダブルクリックすると、ode-0.11.1というフォルダーがデスクトップに生成されます。
- ode-0.11.1フォルダをCドライブのすぐ下に移動する
- マウスをode-0.11.1フォルダーに当て、右マウスボタンをクリック、「切り取り(T)」を選択
- スタート→(マイ)コンピュータ→ローカルディスク(c)をダブルクリック
- マウスの右ボタンをクリックし、「貼り付け(P)」を選択
- ビルド(ライブラリの作成)
- ode-0.11.1ではpremakeコマンドを使ってVisual C++ 2008用のソリューションファイルを作成できます.
- コマンドプロンプトを起動する.
スタート→すべてのプログラム→アクセサリ→コマンドプロンプト - 以下のようにコマンドを打ち込む.カットアンドペースト の場合は以下の文字列を使用し,自分で打ち込む場合は2個の-(マイナス)文字がつながって見えるので,下画像を参照して注意深く打ち込んでください.
-
cd c:\ode-0.11.1\build
-
premake4 --with-demos vs2008
注:withの前は-(マイナス)が2個連続している.下画像参照.

成功するとvs2008というVisual C++2008用のディレクトリが生成される.
-
- Visual C++ 2008 Express Editionを起動
- メニューバーから「ファイル(F)」→「開く(O)」→「プロジェクト/ソリューション(P)」を選択
-
c:\ode-0.11.1\build\vs2008\ode.sln
を選択
- ビルドターゲットを必ずDebugDoubleLibとする.これはデバッグ向け,倍精度,静的ライブラリ用.ODEではDLL(Dynamic Link Library)より静的ライブラリ(Static Library)が推奨されています.また,DebugSingleLibを選ぶと単精度の静的ライブラリが生成されますが,エラーが出やすいのでお勧めできません.
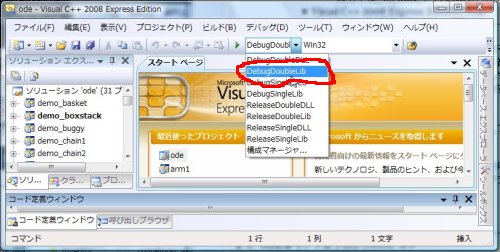
- 「ビルド(B)」→「ソリューションのビルド(B)」を選択
- デモプログラムの実行ファイルは
- c:\ode-0.11.1\lib\DebugDoubleLib に生成される.
- 試しに,demo_basket.exeをダブルクリックして起動すればODEのビルド成功.これで,ODEのインストールは終わりです。
- ダウンロードカテゴリーからrobosimu******(******は日付)をダウンロードして,
c:\ode-0.11.1
にコピーし,そこに解凍する.解凍に成功すると
c:\ode-0.11.1\roboSimu
というディレクトリが生成される.その中にはsrc, texturesフォルダー,premake.exe, premake.lua, Readme.txt, roboSimu.luaファイルががあり,また,srcフォルダーの中にはODE本のサンプルコードがある.
- ODEのインストールと同じように,premakeコマンドを使い,ソリューション,プロジェクトファイルを生成する.コマンドプロンプトを起動し,以下のコマンドを実行する.
-
cd c:\ode-0.11.1\roboSimu
-
premake --target vs2008 注:targetの前は-(マイナス)が2個連続.
-
- Visual C++ 2008 Express Editionを起動
- メニューバーから「ファイル(F)」→「開く(O)」→「プロジェクト/ソリューション(P)」を選択
-
c:\ode-0.11.1\roboSimu\src\roboSimu.sln
を選択
-
- ビルドターゲットをDebugLibとする.
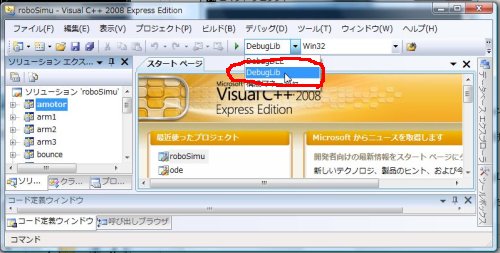
- 「ビルド(B)」→「ソリューションのビルド(B)」を選択
- サンプルプログラムの実行ファイルはc:\ode-0.11.1\roboSimu\DebugLibに生成される.
- 試しに,arm1.exeをダブルクリックして起動すれば成功.お疲れ様でした!

コメント
はじめまして。
現在Windows7にてode-0.12環境をインストールしようとしているのですが、
こちらのODE本サンプルプログラムをビルドすることができません。
何度ビルドしようとしても、「LINK : fatal error LNK1104: ファイル ‘oded.lib’ を開くことができません。」というエラーがでてきます。
確かにODEのビルドで生成されるlibファイルはdrawstuffd.libとode_doubled.libなので
oded.libファイルは見当たらないのですが、生成方法がわかりませんでした。
何か心当たりがあればお教え願えませんでしょうか?
自分の環境はVisualStudio2008でDebugDoubleLibの生成は無事完了しており、
demo_basket.exeの実行も可能であることは確認しております。
書き忘れましたが、
サンプルプログラムは
「robosimu120409.zip」をDLして「C. ODE本サンプルプログラムのビルド」
の記述をもとにビルドしようとしました。
ogaさん、
返事が遅くなりすみません。
ode-0.12をWindows7 + Visiaul C++ 2010 EEでビルドする記事を投稿しましたので、それを参考にやり直して頂けませんか。
http://demura.net/9ode/9619.html
でむ
お世話になります。
私もogaさんと同じ症状、「LINK : fatal error LNK1104: ファイル ‘oded.lib’ を開くことができません。」に困っています。
ただし私はWindows Vista、Visual C++2010EE、ode-0.12の組み合わせです。
ご案内いただいた
http://demura.net/9ode/9619.html
を試してみましたが上手く行きませんでした。
解決策をご教示いただけますと幸いです。
よろしくお願いいたします。
demuさま、はじめまして。
ここのホームページを参考に自分のパソコンにODEをインストールし、roboSimuのサンプルプログラムまで動作することを確認しました。しかし、プログラムの実行速度が異常に速い状態です。dWorldStepの値を小さくすれば物体の動作はゆっくりになりますが、雲の流れは速いままで解決にはなっていないように思います。
自宅の環境はwindows7(64bit),ode-0.11.1,visual C++2008です。もう一台windows7(32bit)のパソコンでも試しましたが同じ症状です。学校のwindows7(64bit),ode-001(?),visual C++2008の環境では正常に動作しているので、何か設定の問題なのでしょうか?
思い当たることがありましたら、知恵を貸していただければと思います。よろしくお願いします。
shiroさま
返事が遅くなりすみません.
さて,雲の流れを遅くするためには,
ode-0.11.1/drawstuff/src/drawstuff.cppのdrawSky関数内の983行にある以下のコードの足す数字を小さくしてビルドしなおしてください.
offset = offset + 0.002f;
でむ
demuさま
返信ありがとうございます。雲の流れる速さが変わることが確認できました。こんなところでいじれるのですね。
また質問になってしまうのですが、全く同じソースコードのプログラムが、使うパソコンによって実行速度が変わってしまうのは、Visual C++の設定が問題なのでしょうか?Corei7やi5を積んでいるパソコンなので、性能で差が出ているわけではないだろうな~と悩んでおります。
よろしくお願いします。
demuさま
返事がいただきました。ありがとうございます。
今確認しました。上記二つ問題がないはずです。ビルドターゲットをDebugDoubleLibとしました。
dsDrawSphereD関数に対してhello.cppは自動でdouble型式に認識されました。但しdRealはfloatに認識されました。(common.h中typedef float dReal)
(DS_API void dsDrawSphereD (const double pos[3], const double R[12],const float radius);)
ちなみにdemo_basket.exeとarm1.exeは実行することがでいます。
もしこのようにdsDrawSphereD((double*)pos,(double*)R,r)キャストしました。新しいエラー(ODE message 2: inertia must be positive definite c:\ode-0.11.1\ode\src\mass.cpp)
もしC:\ode-0.11.1\roboSimu\src中のhello.vcprojを使ってhelloは実行することできました。(dRealはdoubleに認識されました)
エラーが出るprogrammはvisual c++2008で新しprojectを作っただけです。その他hello.cpp、texture.h、resources、ode.h、drawstuff.h、drawstuffd.lib、ode_doubled.lib及び設定はC:\ode-0.11.1\roboSimu\src中のhello.vcprojと完全に同じになった。
それでこのエラーの原因がよくわからないです。
よろしくお願いします。
demuraさま:
上記教えた通りにODEをインストールしました。ありがとうございます。
但しvisual v++2008で本に第一章にHello.cppのプログラムをビルドするときにエラーを出ました。
error C2664: ‘dsDrawSphereD’ : cannot convert parameter 1 from ‘const dReal *’ to ‘const double []’
ちなみにinclude fileとlibを正しくprojectのpropertiesに設定しました。
よろしくお願いします。
Riさん,
このエラーの原因はいくつかあります.
1.ODEを倍精度でインストールしていない
2. #define dsDrawSphere dsDrawSphereDが定義されていない
上の問題はありませんか? それでも解決しない場合は(const double *)でキャストしてください.
http://demura.net/9ode/3132.html より転載
でむ
demuさま
返事がありがとうございます。
倍精度の問題がないはず。ちなみにdemo_basket.exe,arm1.exeが起動できます。
すみません。 #define dsDrawSphere dsDrawSphereDは直接hello.cppに定義しますか?
なおこのようにdsDrawSphereD((const double *)pos,(const double *)R,r)キャストしたらbuild時にエラーがなくなった但しdebug時にODE Message 2:inertia must be positive definite (c:\ode-0.11.1\ode\src\mass.cpp)のエラーを発生しました。ちなみにC:\ode-0.11.1\roboSimu\srcにhello.cpp hello.vcprojを使うときにbuild debuge問題がありません。hello.cpp中にdRealは自動にdoubleを識別されました。(common.hにtypedef double dReal)。何でvisual c++2008で新しいprojectを作ってC:\ode-0.11.1\roboSimu\srcにhello.cpp hello.vcprojと同じなhello.cppを追加したinclude file directoryとlib name,lib file directory,drawstuff textureを設定した エラーを出ました。よくわからないです。
よろしくお願いします。
[…] Windows+Visual C++はこのページ […]
B. 「odeのダウンロード」の手順5のコマンドプロンプトを使用し例に従って
文字を打ち込んだところ、’C:\ode-0.11.1\build’は内部コマンドまたは外部コマンド
操作可能なプログラムまたはバッチ ファイルとして認識されていません.と表示されてしまいました。
このエラーに対する対処法がわかりません。どうすればよいのでしょうか。教えてください。
sunlightさん,
遅くなりすみません.
コマンドプロンプトで以下のように入力されたでしょうか? エラーメッセージを見る限りcdコマンドを打ち忘れているように思えます.
cd スペース C:\ode-0.11.1\build リターン
それでも,だめな場合は,cdコマンドが使えるか試してください.
でむ
cdコマンドの入力を忘れていたようです。
解決しました、ありがとうございました。
roboSimu090614をビルドしてみたら、”c1xx : fatal error C1083: ソース ファイルを開けません。’..\..\roboSimu\src\hello.cpp’: No such file or directory”とファイルはあるのに言って来てビルドが通りません。(全てです)何でですか?対処法はありますか?
demuさん はじめまして
ODEを使い始めたpikaというものです。
windows vistaでODE 0.11.1を使っています。
roboSimuをソリューションのビルドして
いざ出来た実行ファイルを実行すると
出てくるウィンドウが真っ白で
シミュレーションの状況がわかりません。
実行でき、エラーメッセージも出ないのですが・・・
計算はされているみたいです。
原因はなんでしょうか?
お願いします
アイアンホースです。
ビルド(ライブラリの作成)を実行したらコンパイルできました。
ありがとうございました。
demuさん
私の確認不足で大変申し訳ないのですが,
DebugLibがDebugDLLになってしまっていたようです.
それでこれまでのようなエラーは消えたのですが,
コンパイルの際以下のようなエラーが3つだけ出ます.
5>c:\ode-0.11.1\robosimu\src\sensor4.cpp(58) : error C2057: 定数式が必要です。
5>c:\ode-0.11.1\robosimu\src\sensor4.cpp(58) : error C2466: サイズが 0 の配列を割り当てまたは宣言しようとしました。
5>c:\ode-0.11.1\robosimu\src\sensor4.cpp(58) : error C2133: ‘contact’ : サイズが不明です。
一応,実行ファイルは正常に動いていると思われます
(きちんと詳細まで見ていないので本当に正常かは分かりませんが).
また自作プログラムのビルド法
* I. プロジェクトファイルを使わない方法
を行ってみたのですが,他の方と同様に
「LINK : fatal error LNK1104: ファイル ‘ode_doubled.lib’ を開くことができません。」
というエラーが出ます.
初めまして。
私も???さんと同じなのですが,サンプルプログラムが動きません.
c:\ode-0.11.1\lib\DebugDoubleLibにode_doubled.libとdrawstuffd.libはきちんとありますし,
Windowsの環境変数の変更はしたのですが・・・
error LNK2019: 未解決の外部シンボル _gluBuild2DMipmaps@28 が関数 “public: __thiscall Texture::Texture(char *)” (??0Texture@@QAE@PAD@Z) で参照されました。
1>..\..\lib\DebugDoubleLib\demo_boxstack.exe : fatal error LNK1120: 外部参照 1 が未解決です。
というエラーが出てサンプルプログラムがうごきません・・・.
ちなみに,0.9バージョンは動いています.