 lecture
lecture WSL: Gazeboでロボットが動かないとき
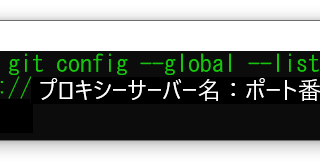
注:以下の方法で動く場合もありますが、動かなくなる場合が多いので解決になっていません(2018-12-01)。WSL(Windows Subsystem for Linux)のUbuntuでROS演習...
 lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture