 robocup@home
robocup@home RoboCup: Kobukiに緊急停止スイッチをつける
Kobukiに緊急停止スイッチをつけたときのメモ。本体を分解しないでつくばチャレンジではソフトウェアスイッチは禁止されているが、RoboCup@Homeでは禁止ではない。特に、RoboCup@Home...
robocup@home  robocup@home
robocup@home  robocup@home
robocup@home  misc
misc  robocup@home
robocup@home  misc
misc  robot
robot  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture 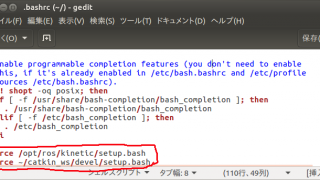 lecture
lecture  lecture
lecture  robot
robot  misc
misc  misc
misc  misc
misc  education
education  education
education  education
education  misc
misc  education
education  robocup
robocup  misc
misc  misc
misc 