
 Image by Ulrike Leone from Pixabay
Image by Ulrike Leone from Pixabay
ROS新人のためのKobuki、Turtlebot2を使った教育プログラムです。研究室体験プログラムに参加している学部1年生やプレゼミに参加している3年生のために現在進行形で作っています。そのため内容が頻繁に変わると思いますが、何かの参考になれば幸いです。
- 環 境
- Ubuntu18.04
- Kobuki
- 準 備
- シミュレータ演習(Python)
- ROS Pythonスタイルガイド
- ROS新人演習1:亀で遊ぼう!
- ROS新人演習2:はじめてのROSプログラミング(Python)
- シンプルな配信者(Publisher)と購読者(Subscriber)を書く(Python)
- 上のリンクはros wikiのチュートリアルです。新人教育プログラムではcatkin buildコマンドを使うのでcatkin_makeの代わりにcatkin buildを実行してください。
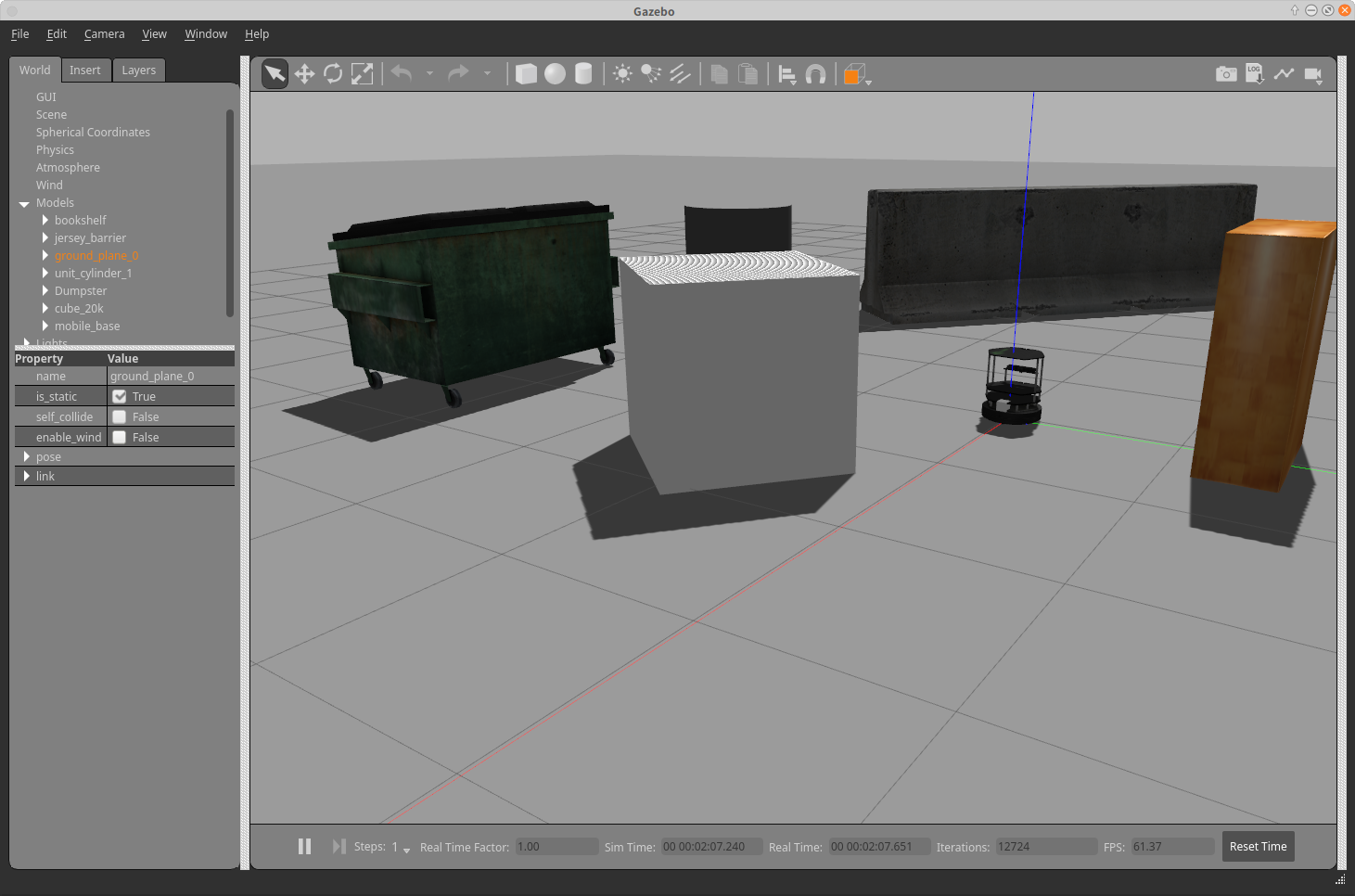
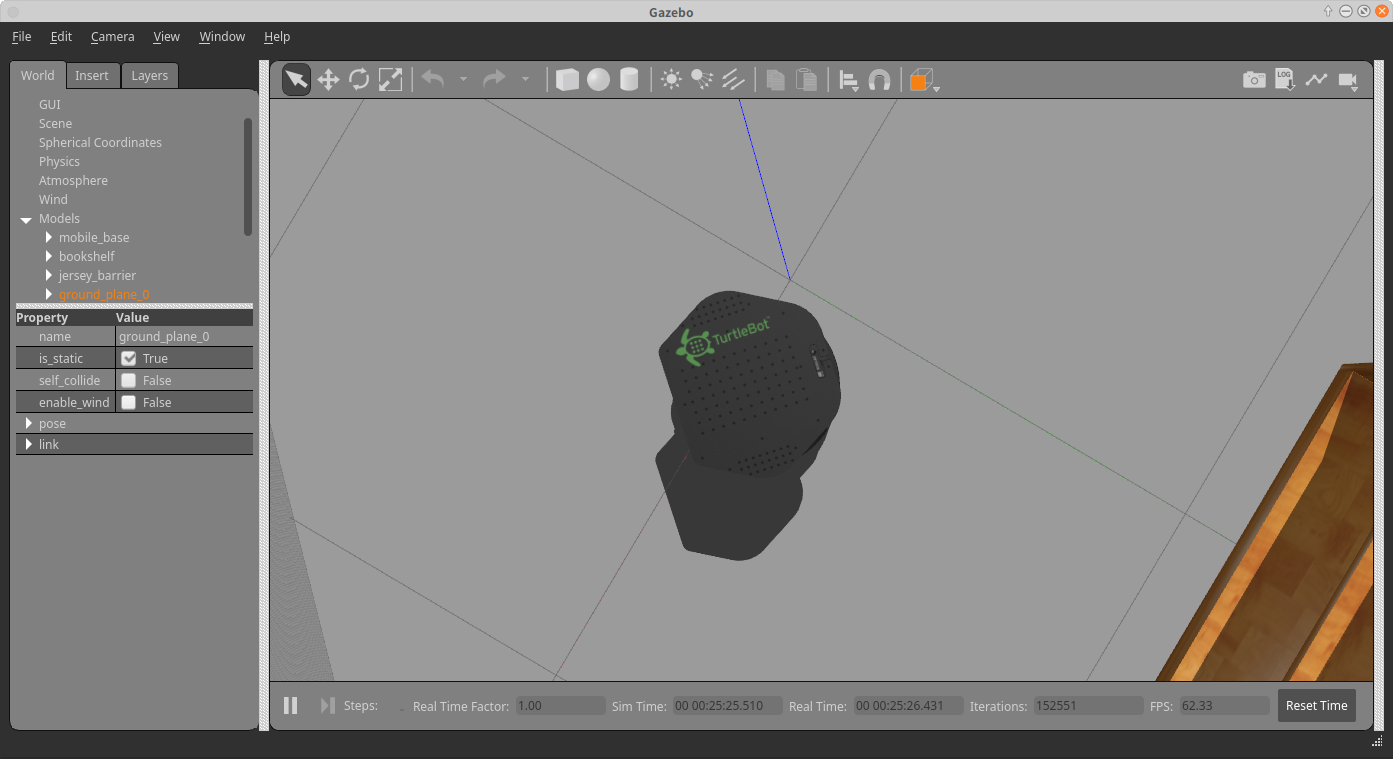
- シミュレータでKobukiを動かそう!
- ウェイポイントナビゲーション(ActionLib:Python)
- トピック通信しよう!(python)
- リアルロボット演習(Kobuki実機を使用)
終わり
コメント