この記事はKobukiを使ったROS新人プログラム用の記事です。今回はシミュレータGAZEBOを使い、Kobuki(Turtlebot2)を動かします。
Simulator GAZEBOを動かそう
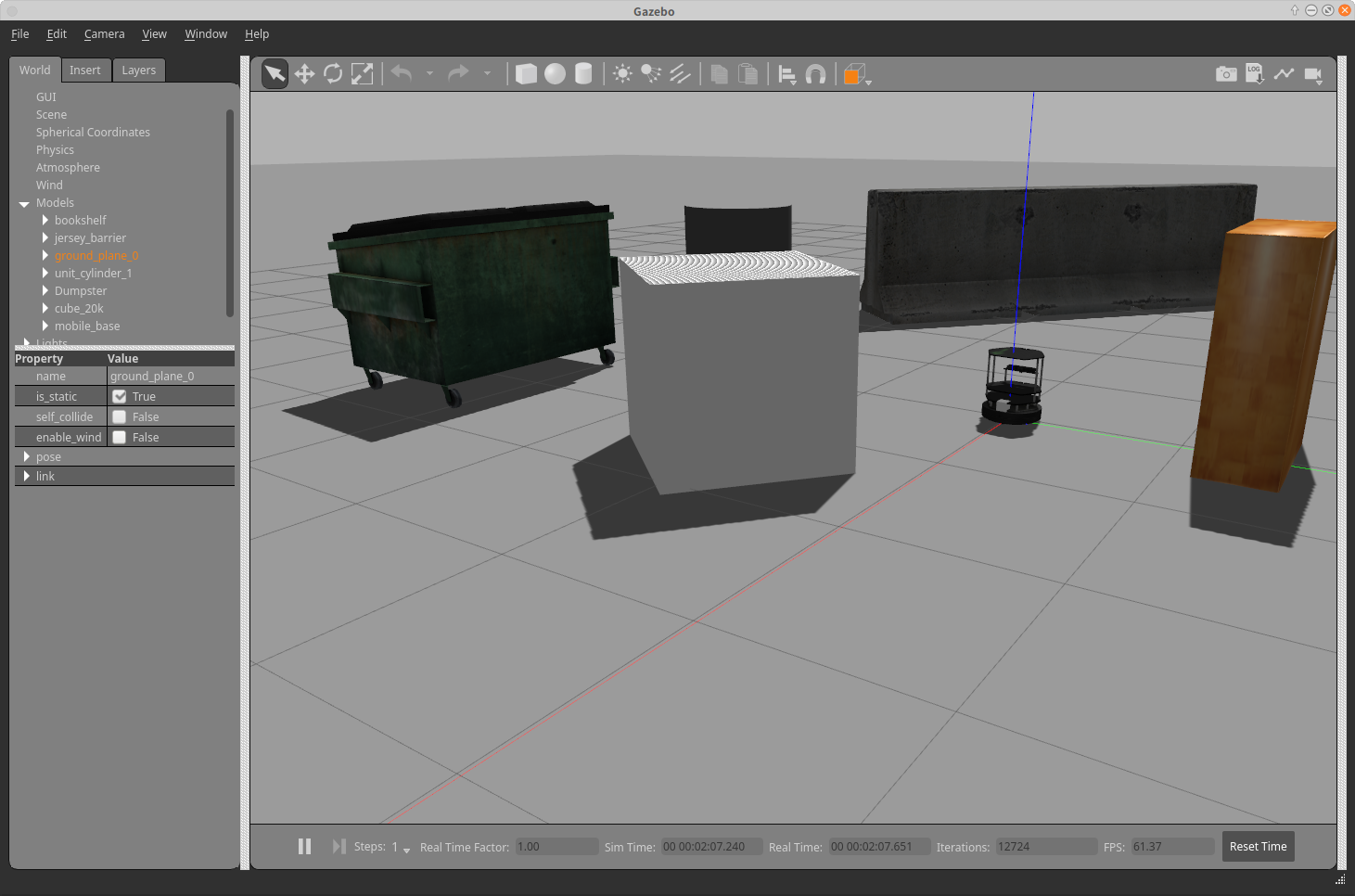
次のコマンドでROSのシミュレータGazeboを起動する。
$ roslaunch turtlebot_gazebo turtlebot_world.launch
初回はネットからモデルを取得するので、私の環境で5分程度かかった。しばらくすると次のようなウインドウが開く。下のロボットがTurtlebot2 (kobuki)。

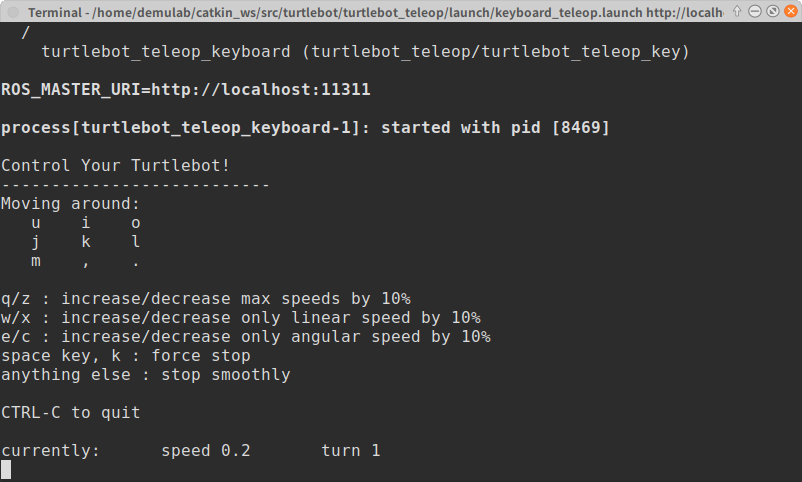
別の端末を開き、次のコマンドを入力するとキーボードからロボットを操縦するためのlaunchファイルを起動。
$ roslaunch turtlebot_teleop keyboard_teleop.launch
端末に下のように表示される。以下のキーでロボットを操作できる。いずれかのキーを押してロボットを動かそう!なお、マウスのカーソルがturtlebot_teleop_key.launchを起動した端末上になければ動かないので注意。
- キー
- i: 前進
- j:その場、左回転
- k: 停止
- l:その場、右回転
- m:左後方へ回転
- o:右前方へ回転
- u:左前方へ回転
- ,:後進
- .:右後方へ回転
お疲れ様!

コメント