この回ではKobukiでROSの地図生成パッケージgmappingを使い地図を生成しましょう。次回は、ここで作った地図を使いKobukiをナビゲーションのために保存します。
- 端末を6個開き、各端末で以下のコマンドを実行する。
- 1. $ roslaunch turtlebot_bringup minimal.launch
- 2. $
rqt --force-discover -s kobuki_dashboard- エラー処理
- qt_gui_main() found no plugin matching “kobuki_dashboard”と怒られる場合
- $ sudo apt install pyqt4-dev-tools
- $ sudo apt-get install pyqt5-dev-tools
- $ cd ~/catkin_ws/src
- $ git clone https://github.com/yujinrobot/kobuki_desktop.git
- $ git clone https://github.com/yujinrobot/kobuki.git
- $ cp ./kobuki/kobuki_testsuite .
- $ mkdir ~/tmp
- $ mv ./kobuki ~/tmp/.
- $ catkin build
- qt_gui_main() found no plugin matching “kobuki_dashboard”と怒られる場合
- エラー処理
- 3. $ roslaunch turtlebot_bringup 3dsensor.launch
- 4. $ roslaunch turtlebot_teleop ps3_teleop.launch
- 5. $ roslaunch turtlebot_navigation gmapping_demo.launch
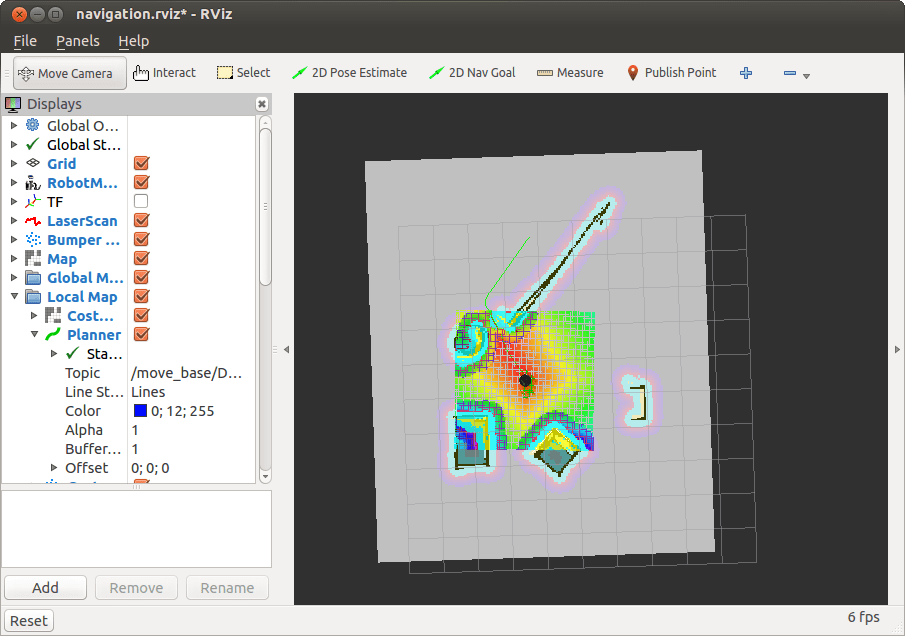
- 6. $ roslaunch turtlebot_rviz_launchers view_navigation.launch
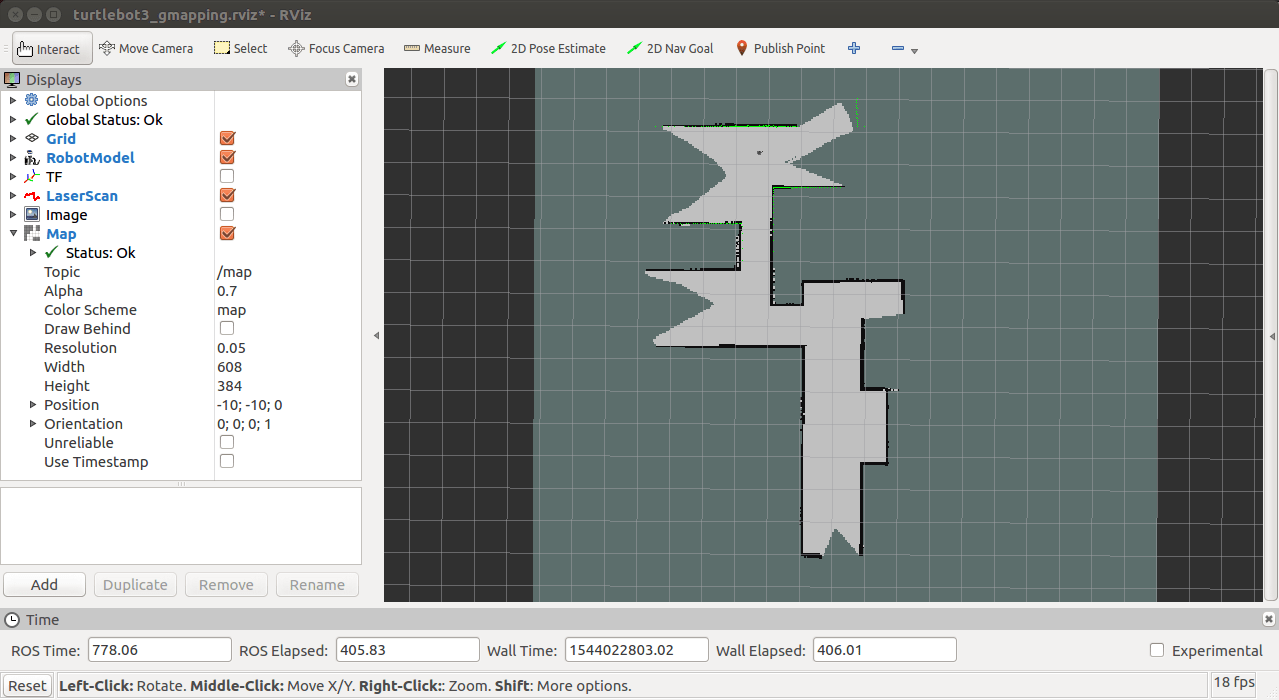
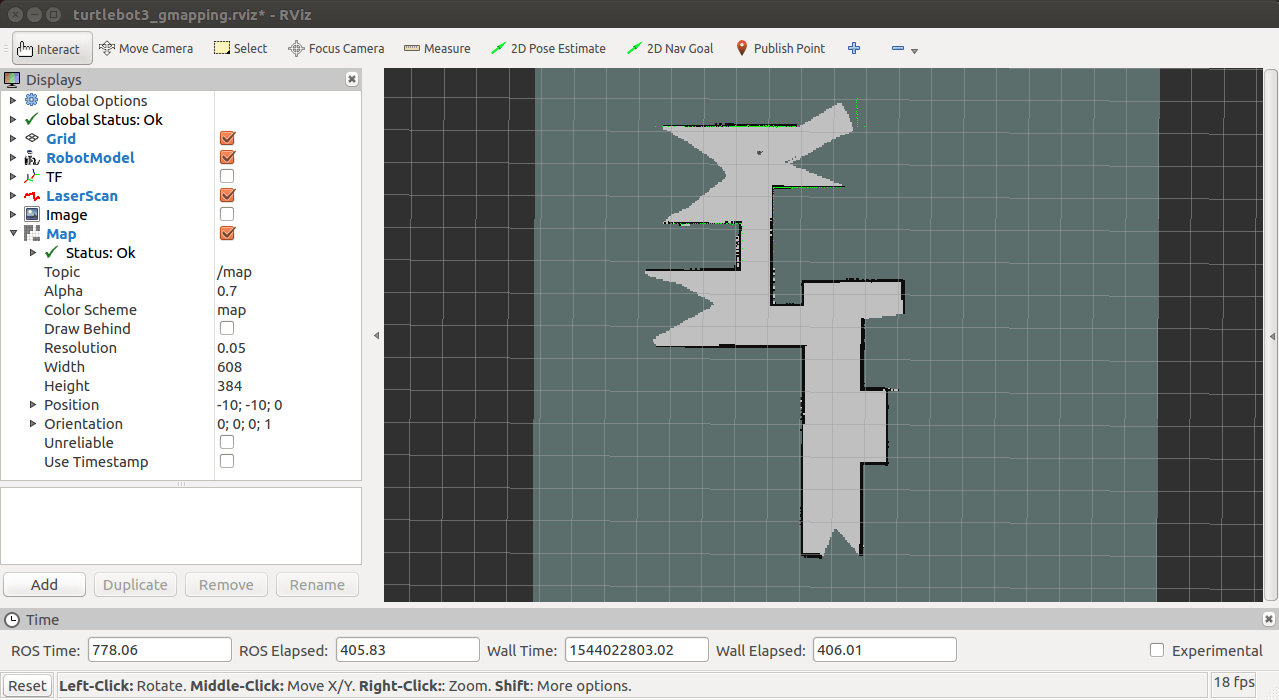
- コントローラを使ってロボットを遠隔操作し地図を生成する。移動に伴い地図が生成されるのをRvizで確認できる。
- 地図は自動的に保存されないので、別の端末を開き次のコマンドを実行することで保存できる。
- $ mkdir ~/map
- $ rosrun map_server map_saver -f ~/map/mymap
- -f以降は好きな名前に変更できる。この例では、ホームディレクト(~)直下のmapディレクトリにmymap.yamlとmymap.pgmファイルが保存される。yamlが設定ファイル、pgmが画像ファイル。
終わり

コメント