この記事は私が金沢工業大学ロボティクス学科で担当している2019年度後学期開講講義ロボットプログラミングⅡで使った演習をまとめたものです。使用言語はC++となっています。

ROS演習1-2019:亀で遊ぼう!
この記事は私が金沢工業大学ロボティクス学科で担当している2019年度後学期開講講義ロボットプログラミングⅡ用です。Windows Subsystem for Linux(WSL)にROSをインストール...
demura.net
2019.10.12
ROS演習2-2019:はじめてのROSプログラミング(catkin build)
この記事は私が金沢工業大学ロボティクス学科で担当している2019年度後学期開講の講義ロボットプログラミングⅡ用です。ROSでHellow Worldと表示するプログラムを作り、ビルドして実行してみまし...
demura.net
2019.11.06

ROS演習3-2019:シミュレータでTurtlebot3を動かそう!
この記事は私が金沢工業大学ロボティクス学科で担当している2019年度後学期開講の講義ロボットプログラミングⅡ用です。シミュレータGAZEBOを使い、Turtlebot3を動かします。次のTurtleB...
demura.net
2019.10.12
ROS演習4-2019: トピック通信しよう!
今回はROSの通信方式であるトピックを学びます。1. Publisherキーボードからロボットを操縦するmy_teleopパッケージを作ろう!ROS演習2と同じ要領でmy_teleopパッケージを作り...
demura.net
2019.10.15
ROS演習5-2019:サービス通信しよう!
今回はROSの通信のもう一つの通信方式であるサービスを理解しましょう。次のROS Wikiを参考にしています。 C++でシンプルなサービスとクライアントを書く シンプルなサービスとクライアントを実行し...
demura.net
2019.10.15

ROS演習6-2019:Turtlebot3をプログラムで動かそう
ROS演習4の知識を使いTurtlebot3をプログラムで動かします。この演習6は演習7を問題を解くためのヒントとなっています。まず、Robotクラスを作成し、次のメンバ関数を作成します。 指定速度で...
demura.net
2019.11.26

ROS演習7-2019:デッドレコニングを実装しよう!
今回はTurtlebot3にデッドレコニングを実装します。 デッドレコニング説明資料 以下の説明資料をダウンロードして読んでください。これをGazebo上のTurtlebot3に実装していきましょう。...
demura.net
2019.11.26

ROS演習8-2019:地図作成・自己位置推定 (gmapping, amcl)
この記事は私が金沢工業大学ロボティクス学科で担当している2019年度後学期開講の講義ロボットプログラミングⅡ用です。今回は地図作成にgmappingパッケージと自己位置推定にamclパッケージを使いロ...
demura.net
2019.11.27
ROS演習9-2019:ナビゲーションとアクションプログラム
この記事は私が金沢工業大学ロボティクス学科で担当している2019年後学期開講の講義ロボットプログラミングⅡ用です。ROS演習8ではrvizを使いGUIでロボットを動かしましたが、今回はROSのActi...
demura.net
2019.12.04

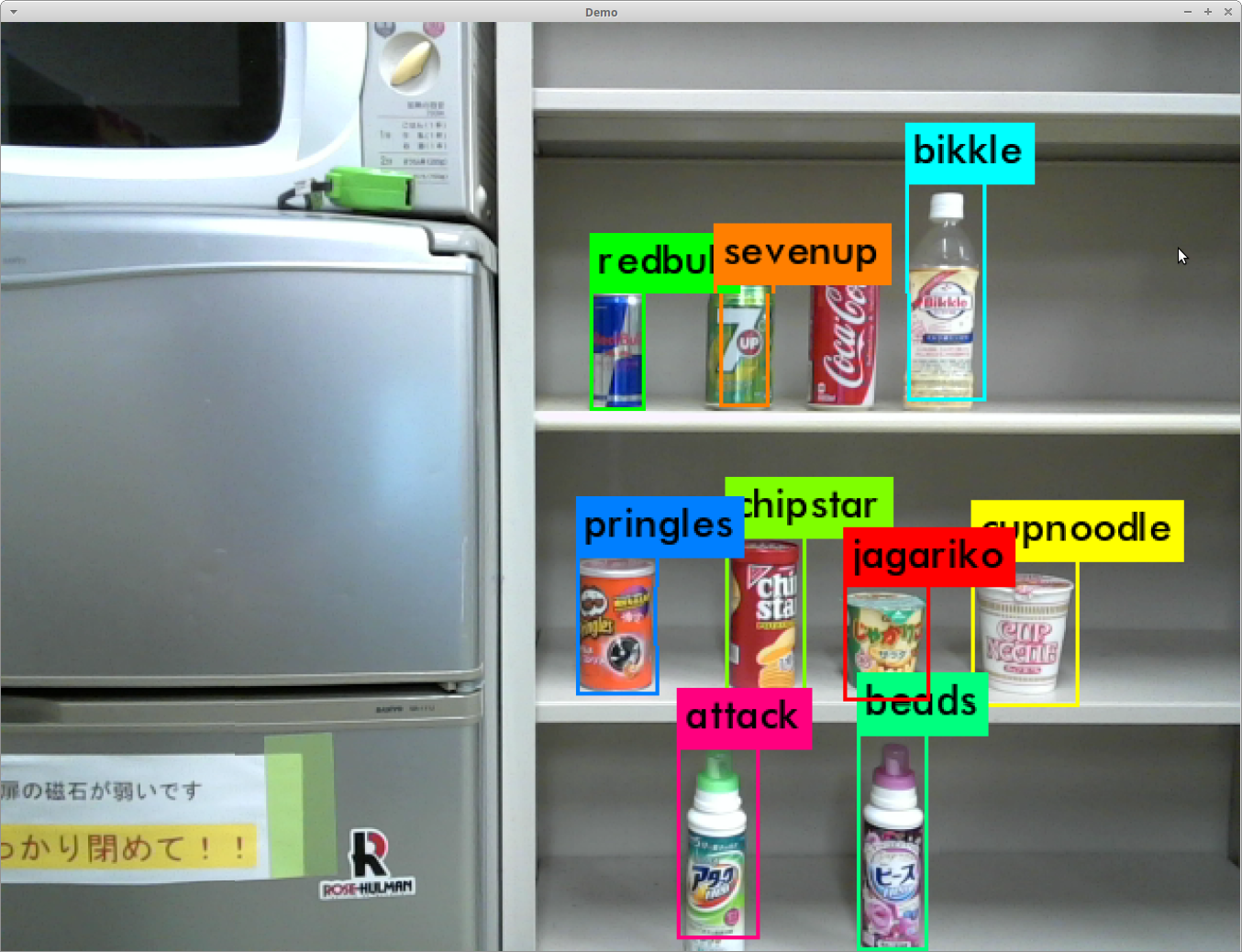
ROS演習10-2019: ロボットビジョン (OpenCVとの連携)
この記事は私が金沢工業大学ロボティクス学科で担当している2019年度後学期講義ロボットプログラミングⅡ用です。今回はcv_bridgeを使います。ROSでOpenCVを使いgazeboシミュレータのR...
demura.net
2019.12.10
ROS演習11-2019:ロボットアーム
この記事は私が金沢工業大学ロボティクス学科で担当している講義ロボットプログラミングⅡ用です。今週はgazeboを使い2自由度のロボットアームを作り、関節を動かします。2自由度ロボットアームのURDFは...
demura.net
2019.12.11

ROS演習12-2019:ロボットアーム2
この記事は私が金沢工業大学ロボティクス学科で担当している講義ロボットプログラミングⅡ用です。今回は先回作った2自由度のロボットアームの先端に位置センサを取り付け、先端位置を取得するプログラムを作ります...
demura.net
2020.01.09
終わり

コメント