AIロボット入門2025:第1週 AIロボットをつくろう!
金沢工業大学ロボティクス学科3年次2025年後学期開講のAIロボットプログラミング(2単位)の「第1週 AIロボットをつくろう!」のサポートページです。教科書は、拙著「ROS2とPythonで作って学...
 lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  education
education  education
education 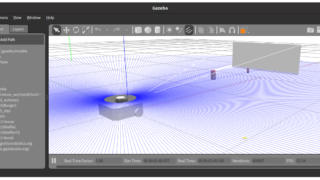 education
education  education
education  education
education  education
education  education
education  education
education  education
education  education
education  lecture
lecture  lecture
lecture  lecture
lecture  lecture lecture lecture lecture
lecture lecture lecture lecture 