 robocup@home
robocup@home Jetson Xavier: Turtlebot2をROS Melodicで動かす
Jetson XavierでTurtlebot2を動かそうと思ったところ、Xavierに対応しているOSはUbuntu18.04、ROSはMelodic。製造元のYujin RoboticsはMelo...
robocup@home  robot
robot  robot
robot 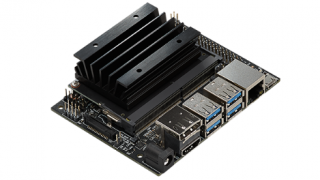 robocup
robocup  deeplearning
deeplearning  robocup@home
robocup@home  robocup@home
robocup@home  robocup@home
robocup@home  robocup@home
robocup@home  robot
robot  robocup
robocup  つくばチャレンジ
つくばチャレンジ  robocup@home
robocup@home  robocup@home
robocup@home  robocup
robocup 