 lecture
lecture HARD2020:ルンバの位置をPythonで知る
Pythonプログラムでルンバの位置を知ろう!ここでの位置はROSで計算したodometry(オドメトリ情報です。オドメトリはロボットの車輪回転速度から移動量を求め自分の位置を計算する方法のことです。...
lecture  lecture
lecture  education
education  education
education  lecture
lecture  lecture
lecture  education
education  education
education  education education
education education  education
education  education
education  education
education  education
education  education
education  education
education  education
education  education
education  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture 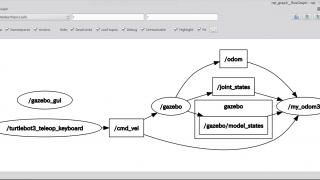 lecture
lecture