 lecture
lecture ロボットプログラミングⅡ-2021:USB Linuxの作り方 (Ubuntu20.04)
この記事は金沢工業大学 ロボティクス学科で2021年後学期開講中のロボットプログラミングⅡ用です.今期の授業では,WSL2ではなくUSBメモリにUbuntu20.04をインストールします.これをUSB...
lecture  lecture
lecture  lecture
lecture  lecture
lecture 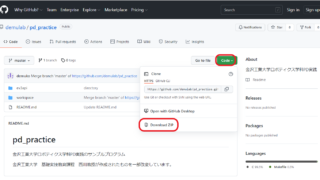 lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  education
education  lecture
lecture  lecture lecture
lecture lecture  lecture
lecture 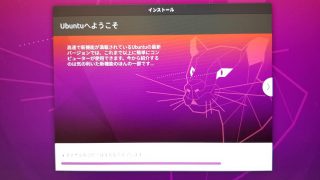 lecture
lecture  education
education  deeplearning
deeplearning  deeplearning
deeplearning  lecture
lecture 