 lecture
lecture プログラミング言語2021:VS Code (VSCodium) の使い方
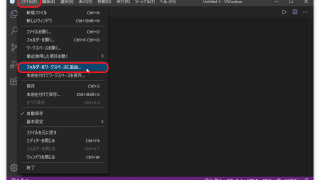
この記事はKITロボティクス学科プログラミング言語用で、授業で配布したVSCodiumのポータブル環境用です。 では、さっそくVSCodiumを使ってみましょう。 起 動 デスクトップに作ったVSCo...
lecture 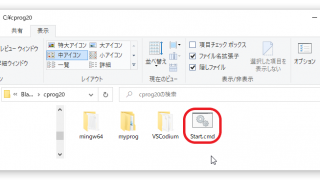 lecture
lecture  education
education  lecture
lecture  lecture lecture
lecture lecture  lecture
lecture  lecture
lecture  education
education  deeplearning
deeplearning  deeplearning
deeplearning  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  education
education  education education
education education  education
education  lecture
lecture  PD実践
PD実践  PD実践
PD実践  lecture
lecture  HARD
HARD 