 education
education ROS演習7-2019:デッドレコニングを実装しよう!
今回はTurtlebot3にデッドレコニングを実装します。 デッドレコニング説明資料 以下の説明資料をダウンロードして読んでください。これをGazebo上のTurtlebot3に実装していきましょう。...
education 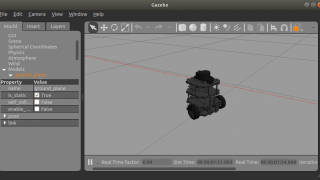 education
education  lecture
lecture  education
education  education
education  education
education 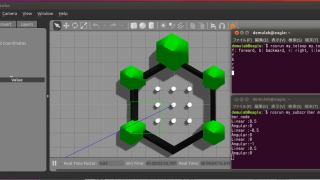 education
education 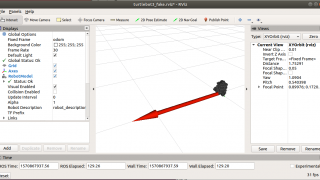 education
education  education
education  education
education  education
education  education
education  education
education  education education
education education  education
education  education
education 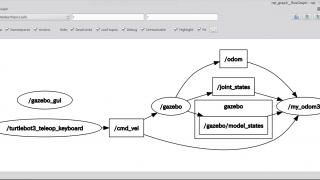 lecture lecture lecture
lecture lecture lecture 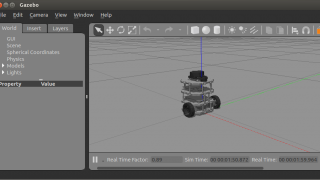 lecture
lecture  lecture
lecture  lecture
lecture  education
education  education
education  education
education  education
education  lecture
lecture 