 education
education ROS新人演習1:亀で遊ぼう!
ROS新人教育プログラムのシミュレータ演習の記事です。前回はROS Melodicをインストールしたので、その動作確認を兼ねてタートル(亀)で遊んでみましょう。この記事は以下の記事を参考にしています。...
education  education
education  education
education  education
education  education
education  education
education  education education
education education  education
education  education
education  education
education  education
education  education
education  education
education  education
education  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture 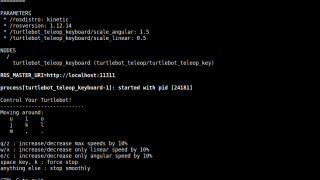 lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  deeplearning
deeplearning  lecture
lecture  education
education  education
education  education
education  education
education