 education
education ロボットプログラミングⅡ-2019:Ubuntu18.04のネットワーク設定
この記事は私が担当している講義ロボットプログラミングⅡ用です。VirtualBox6.0にインストールしたUbuntu18.04でのネットワーク設定を説明します。○ ネットワーク設定(1) 画面左下の...
education  education
education  education
education  education
education  education
education  education
education  education
education  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  education
education  education
education  education
education  education
education  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture 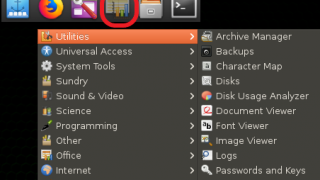 lecture
lecture 