このページは以下のRobotis社e-manualにベースに作成したものです.以下の説明を良く読んで、そのとおり実習を進めてください。ノートPCにLinuxを起動するためのUSBを差し込む前に、PCの電源を入れないでください。
-
-
ロボットを動かす準備
-
本実験ではOpenMANIPULATOR-XのコントローラとしてU2D2 (デバイス名:ttyUSB)を使います.
-
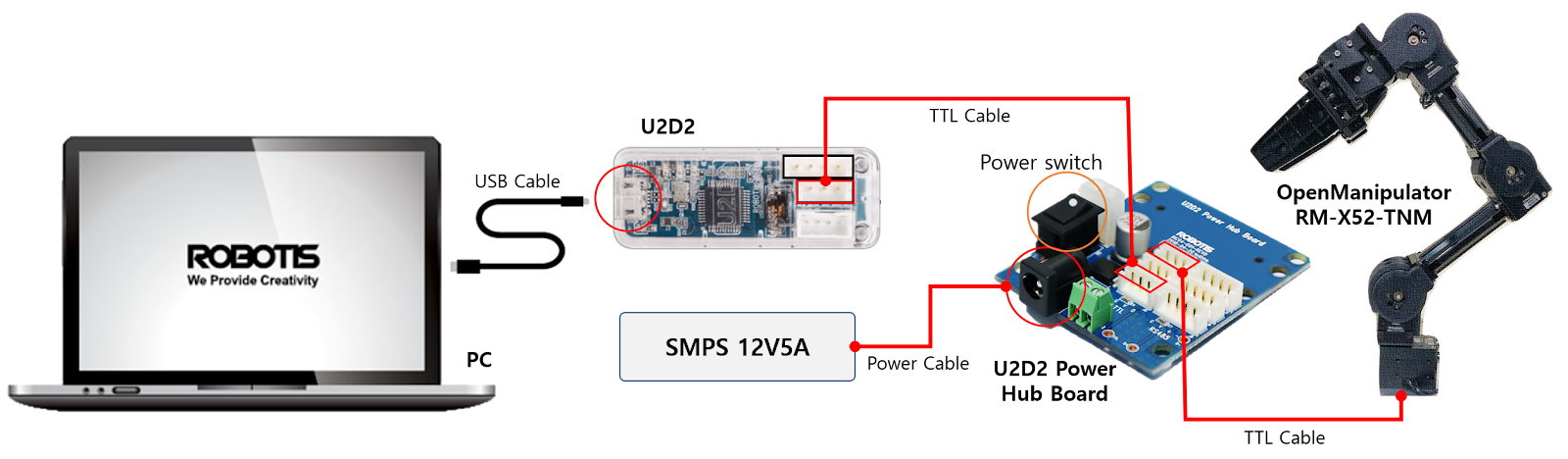
まず,U2D2とノートPCをUSBケーブルで接続する。この時点ではPCに電源を入れてはいけません。
-
次に,U2D2 Power Hub BoardにACアダプタ(SMPS 12V5A) の電源ケーブルを接続して,そのPower switch(電源スイッチ)を入れる.下図のTTL Cableはすでに接続されている。本実験の器材での接続は下の写真を参照(U2D2 Power Hub BoardとU2D2が一体化している)。なお、1週目の実験では使わないが、2週目の実験ではロボットのカメラを使うので、写真にはカメラのUSBケーブルがUSBハブに接続されている。
システム構成図
-
-


-
-
ノートPCに配布されたUSBを差し込む.差し込んだ後にPCの電源を入れる。この順番が大切。このUSBで起動すると実験の設定済みのOSであるUbuntuが起動する.本実験では,Windowsは使わず,Ubuntuを使う.
-
ログイン時にユーザ名とパスワードを聞かれるので以下を入力する.なお,パスワードを入力しても、打ったキーなど何も見えないが気にせず入力してからEnterキーを押す.
-
ユーザ名: kit
-
パスワード:
-
-
ctrl, alt, tを同時に押して端末を開いて,次のlsコマンドを入力してttyUSB0というファイルがあるか確認する.先頭の$はプロンプト(コマンド入力の目印)なので打ち込まない.lsコマンドはファイルを表示するコマンド.ttyUSB0が表示されていれば,U2D2がコンピュータに認識されている.なければ認識されていないので,U2D2とコンピュータとの接続とU2D2 Power Hub Boardの電源が入っているか確認する.
-
$
ls /dev
-
-
ユーザがデバイスを使えるように,chmodコマンドでファイルのパーミッション(権限)を変更する.777は全てのユーザに読み,書き,実行権を与える意味.
-
$
sudo chmod 777 /dev/ttyUSB0
-
-
-
GUIプログラムでロボットを動かそう
まず,GUIプログラムでロボットを動かしてみよう!
-
OpenMANIPULATOR-X コントローラの起動.上の説明で既に実行している場合は次の作業1は不要.
-
$
sudo chmod 777 /dev/ttyUSB0 -
$
roslaunch open_manipulator_controller open_manipulator_controller.launch
-
-
GUI プログラムの起動.別の端末を開き,次のコマンドを実行する.
-
$
roslaunch open_manipulator_control_gui open_manipulator_control_gui.launch
-
-
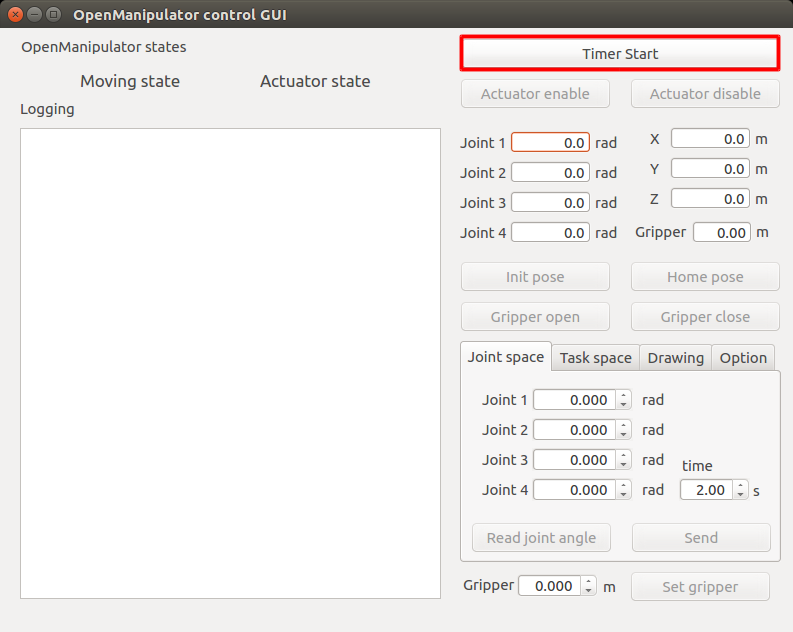
下図のウインドウが開くので右上の Timer Start ボタンをクリックする.
-
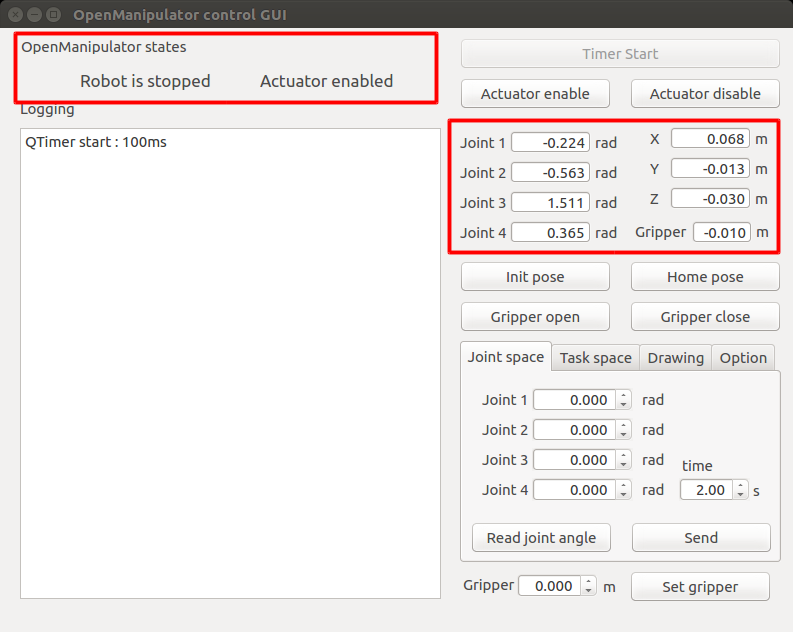
OpenMANIPULATOR-Xの状態をチェックしよう.
-
OpenMANIPULATOR-X をジョイント(関節)空間で動かす場合は, 関節角と軌道時間を入力しから, send ボタンをクリックする.
-
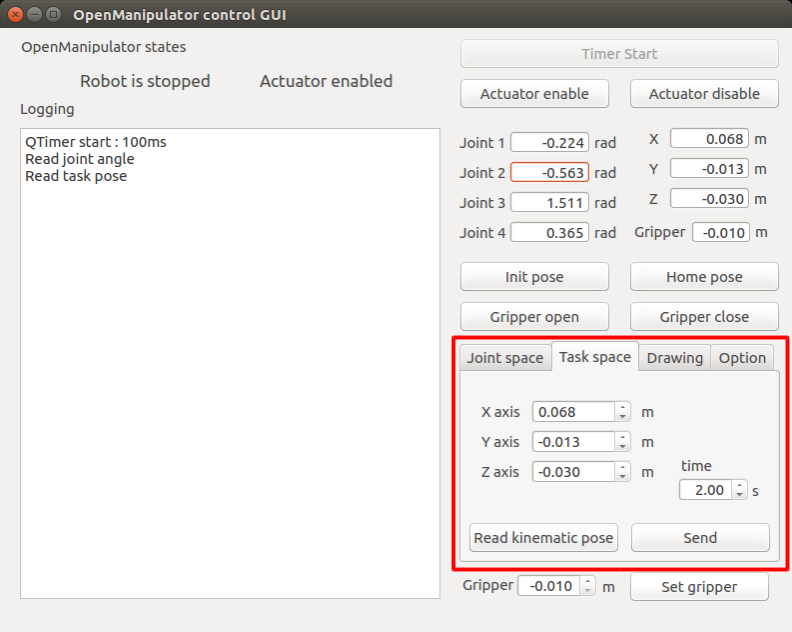
OpenMANIPULATOR-X をタスク空間で動かすためには,X, Y, Z各軸の値と軌道時間を入力してから, send ボタンをクリックする.

終わり

コメント