
アンドロイド端末(スマホやタブレット)からTurtlebotを動してみよう!
(1) 準備
アンドロイドスマホからロボットを操縦する。まず、PlayストアからRocon Remocon (Indigo)をインストールする。

(2) .bashrcの設定
geditで.bashrcを開く。
$ gedit .bashrc
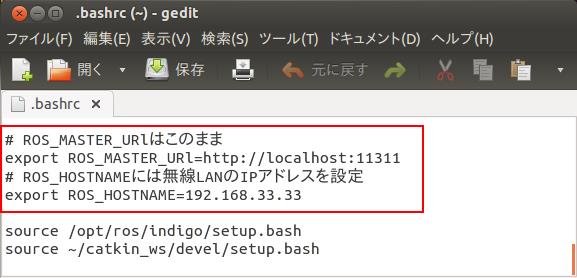
下図のようにROS_MASTER_URl(小文字のエル)とROS_HOSTNAMEを設定する。ROS_MASTER_URlは図と同じ、ROS_HOST_NAMEはubuntuの無線LANのIPアドレスを入力する(この例では192.168.33.33)。IPアドレスはifconfigコマンドで調べる。
(3) 各パッケージ起動
端末を3個起動し、各端末で以下のコマンドを実行。
$ roscore
$ roslaunch kobuki_gazebo kobuki_playground.launch
$ roslaunch turtlebot_bringup minimal.launch
(4) アンドロイドアプリ起動
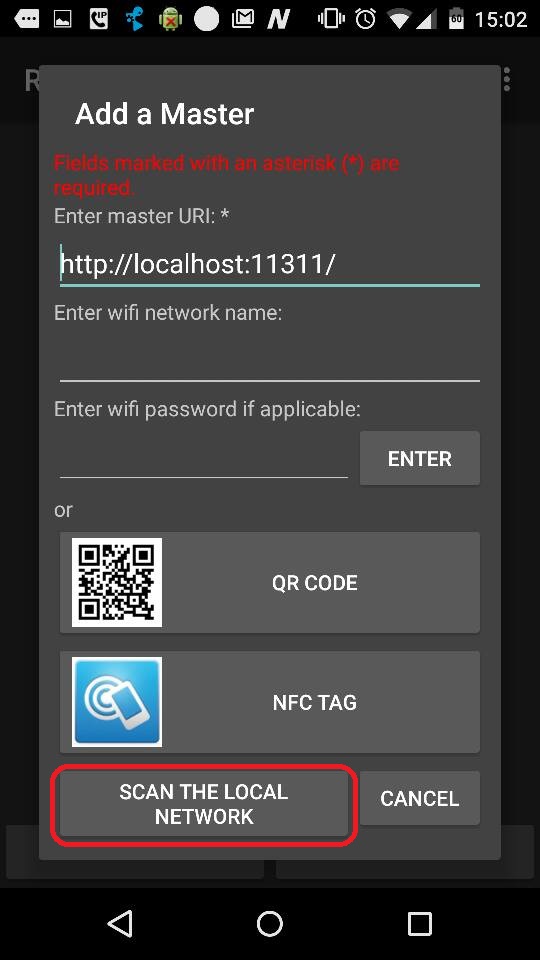
a. Rocon Remoconを起動
![]()
b. “SCAN THE LOCAL NETWORK”をタップ
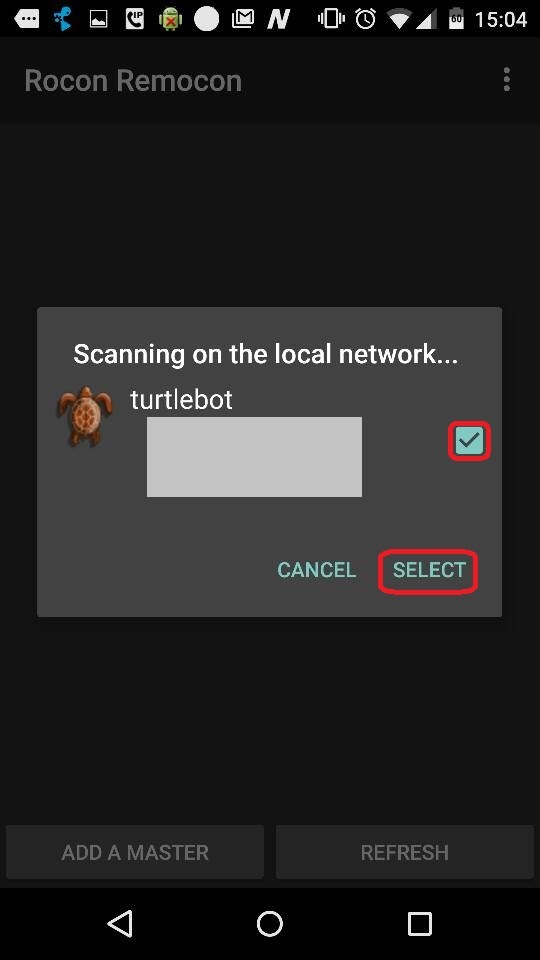
c. ネットワーク設定に問題がなければTurtlebotが見つかる。✔を入れて、”SELECT”をタップ。
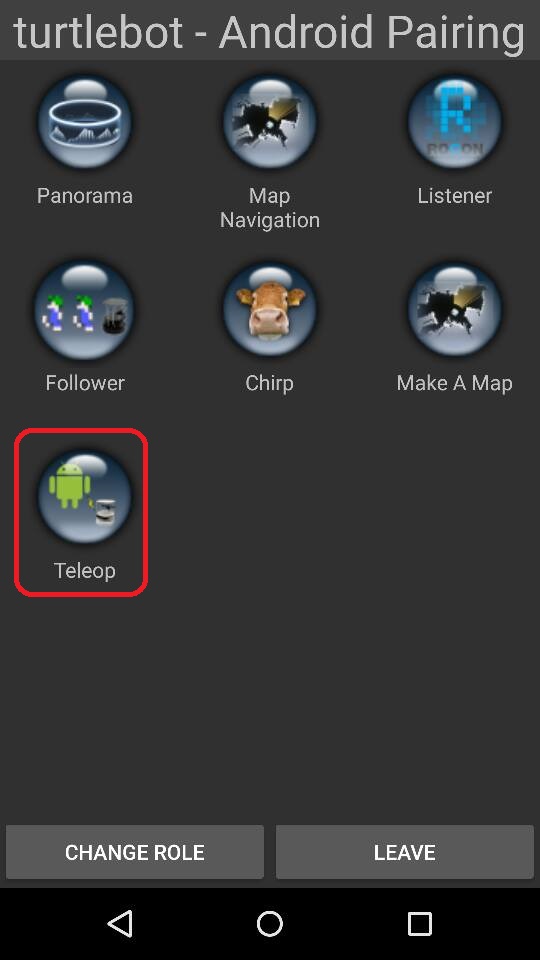
d. “Turtlebot”をタップ。

e. “Teleop”をタップ。
f. “Launch”をタップ。

g. 右側の円から進みたい方向に指で画面をなぞるとその方向に進む。

終わり

コメント