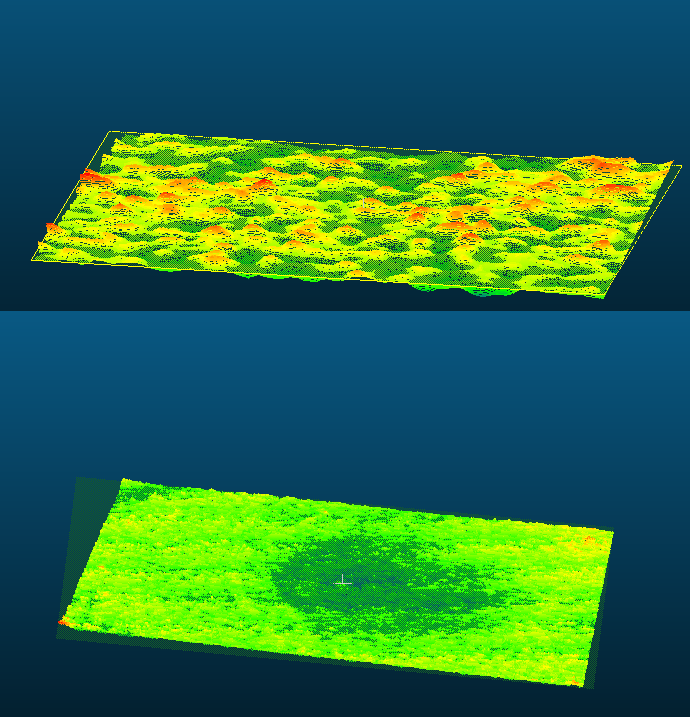
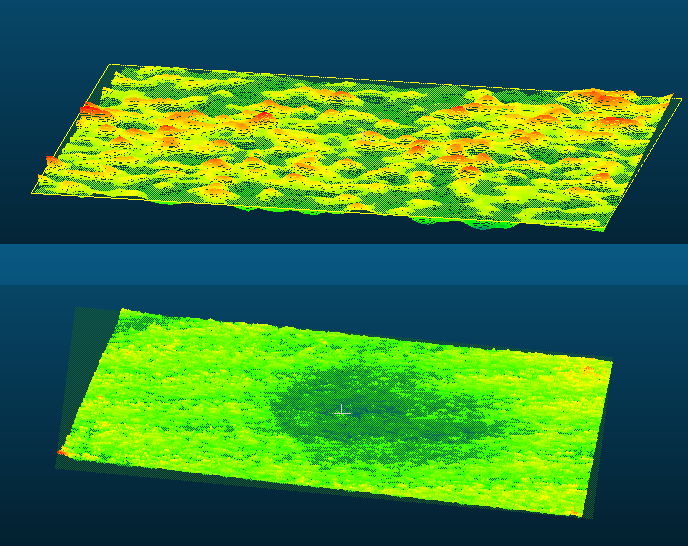
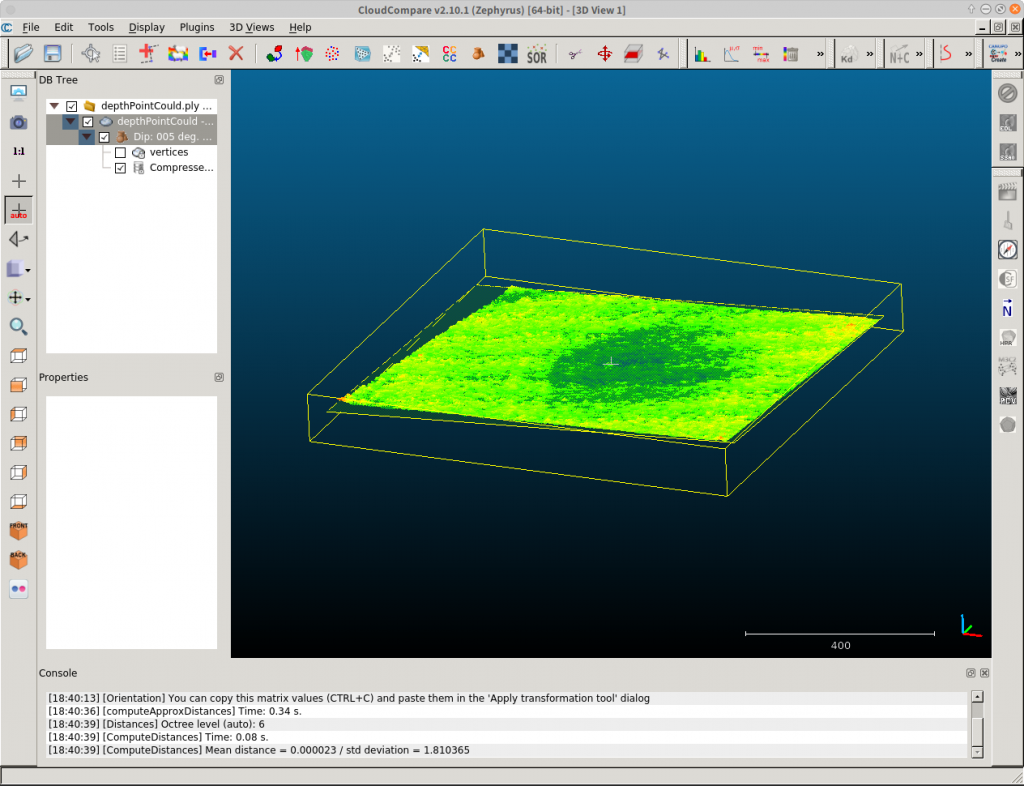
平面の点群(上:RealSense D435i、下:Structure Core)
RealSense D435iとStructure Coreを使いポイントクラウド(点群)からPLY形式の3Dファイルを取得できたので、点群とメッシュの編集ソフトCloudCompareを使って両者を定量的に比較してみた。
CloudCompareのインストールと起動
- CloudCompareはオープンソースの点群とメッシュ編集ソフトウェア。Windows、Mac、Linuxで使える。ライセンスはGPL。
- インストール
- パッケージ管理ソフトSnappyがインストールされていない場合は、次のコマンドでインストールする。
- $ sudo apt -y install snapd
- $ snap insall cloudcompare
- パッケージ管理ソフトSnappyがインストールされていない場合は、次のコマンドでインストールする。
- 起動
- $ cloudcompare.CloudCompare
- 以下のウインドウが開く
CloudCompareを使った平面推定
- では、CloudCompareを使いRealSenseとStructure Coreから取得した点群の3Dファイルを開き、フィッティングする平面を推定してみよう。
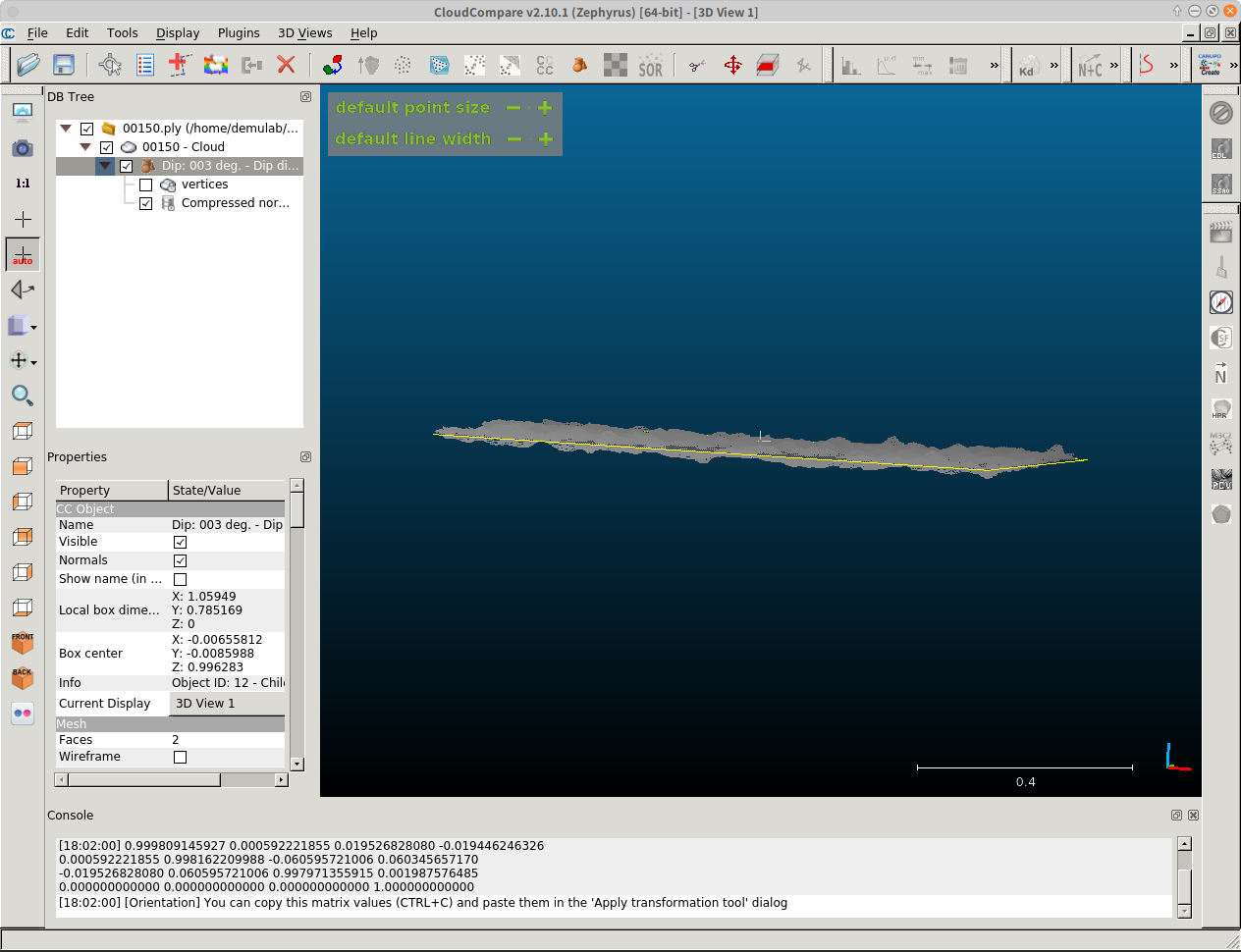
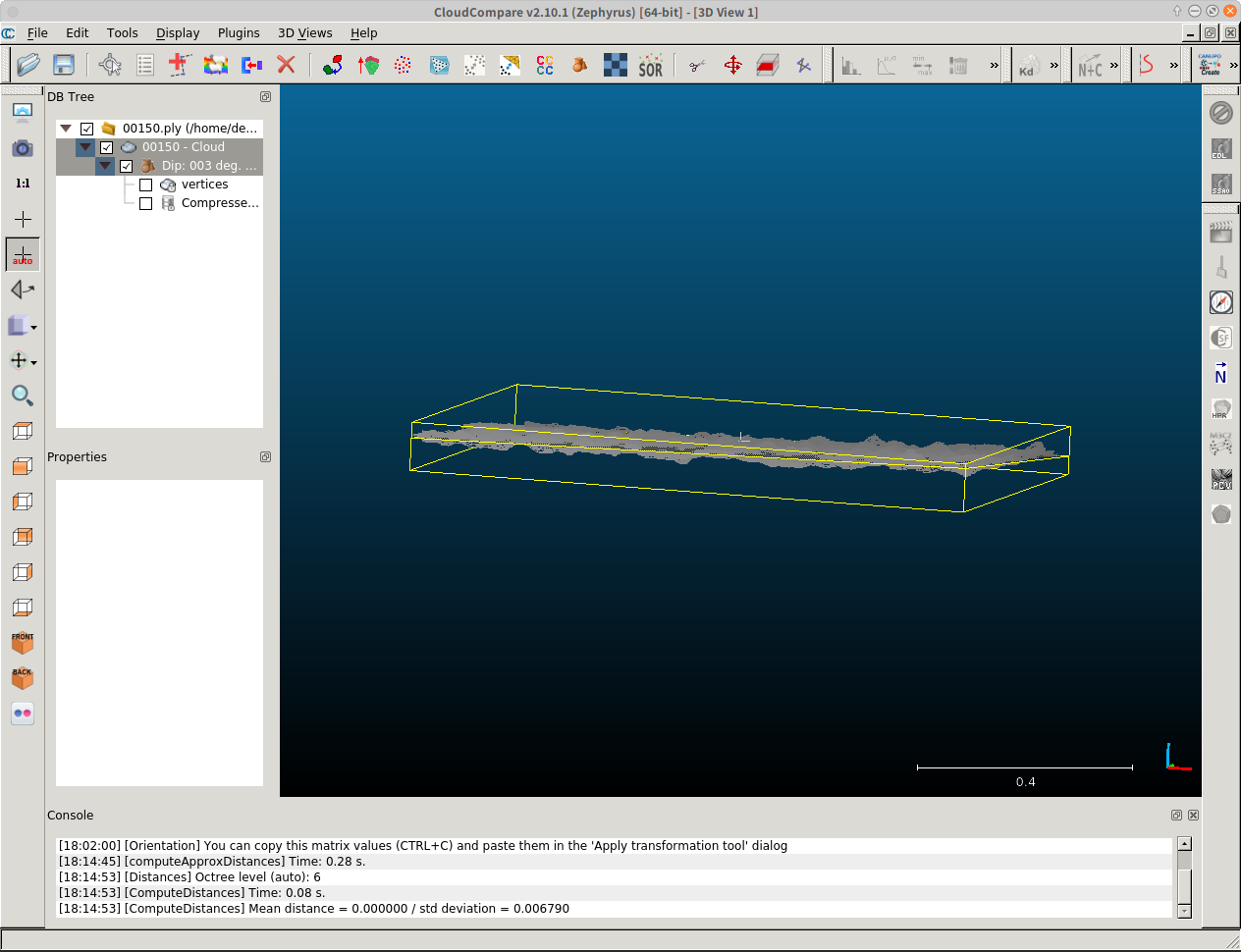
- File -> Open から開くファイルを選択する。この例では、点群ファイル00150.plyを選択し”Open”をクリックする。なお、この00105.pyは1m先の平らな壁をRealSenseで取得したもの。データはここからダンロードできる。
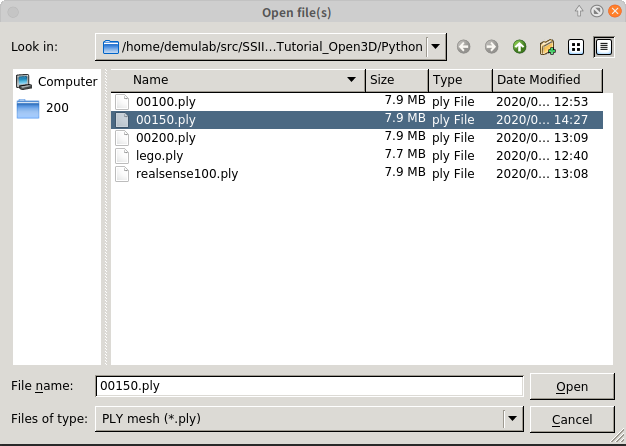
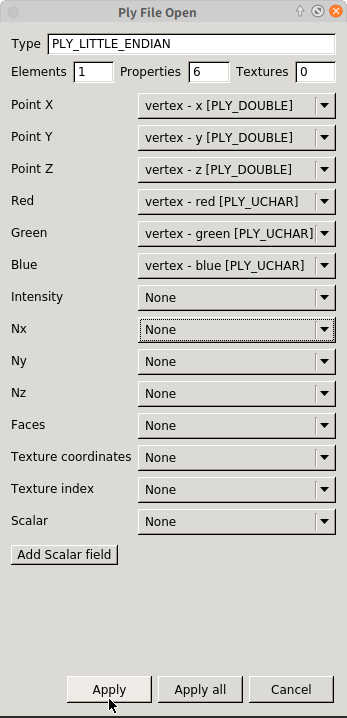
- “Ply File Open”ウインドウが開くので、何も変えずに”Apply”をクリックする。
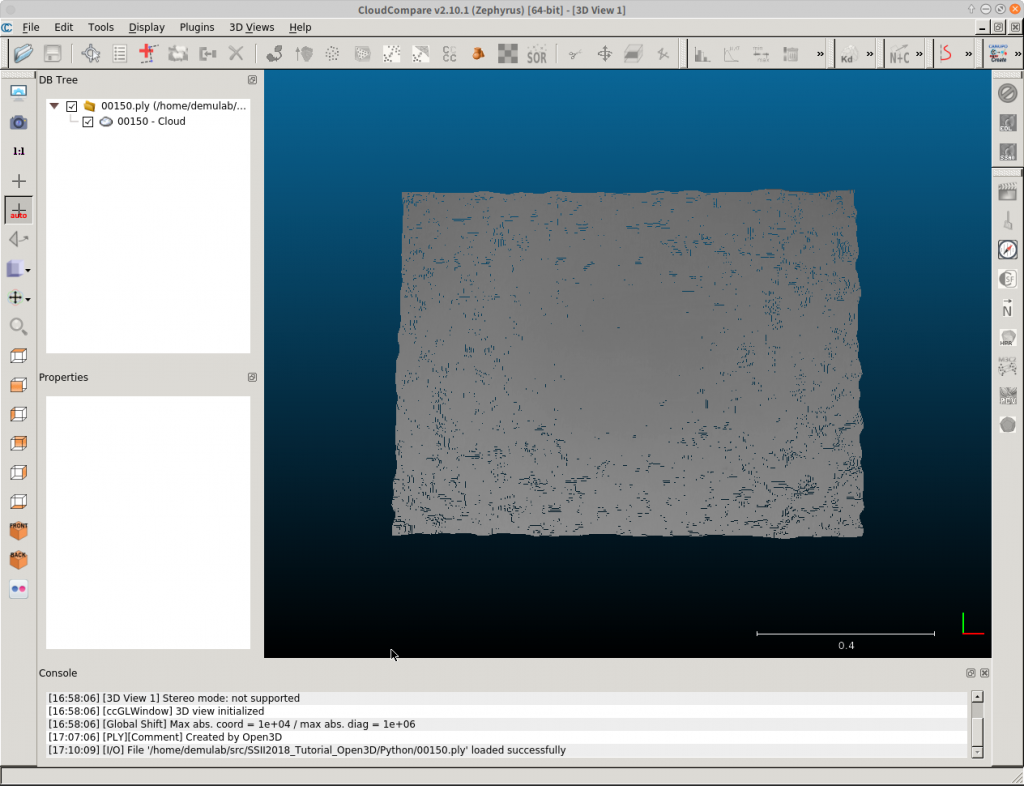
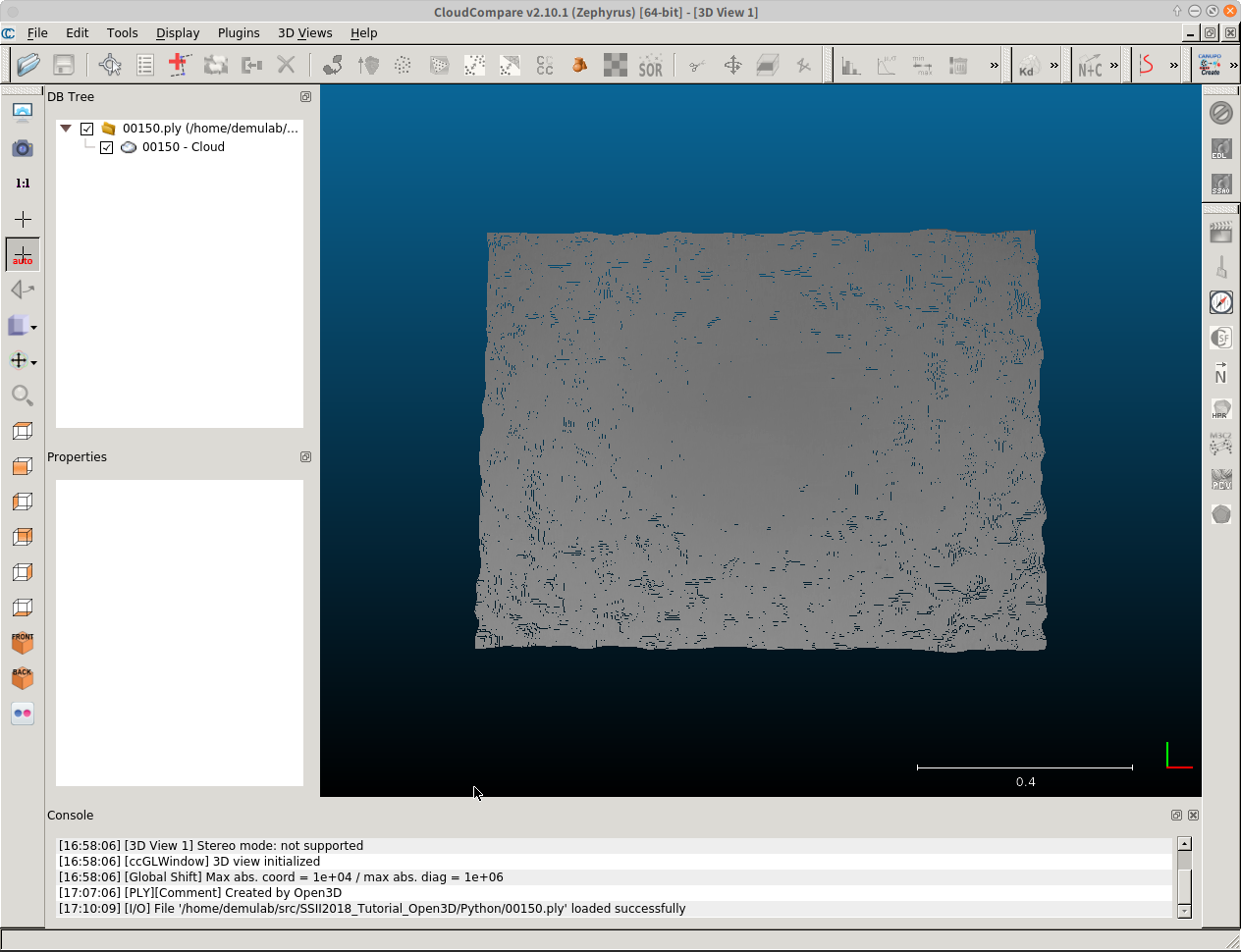
- 点群が表示される。
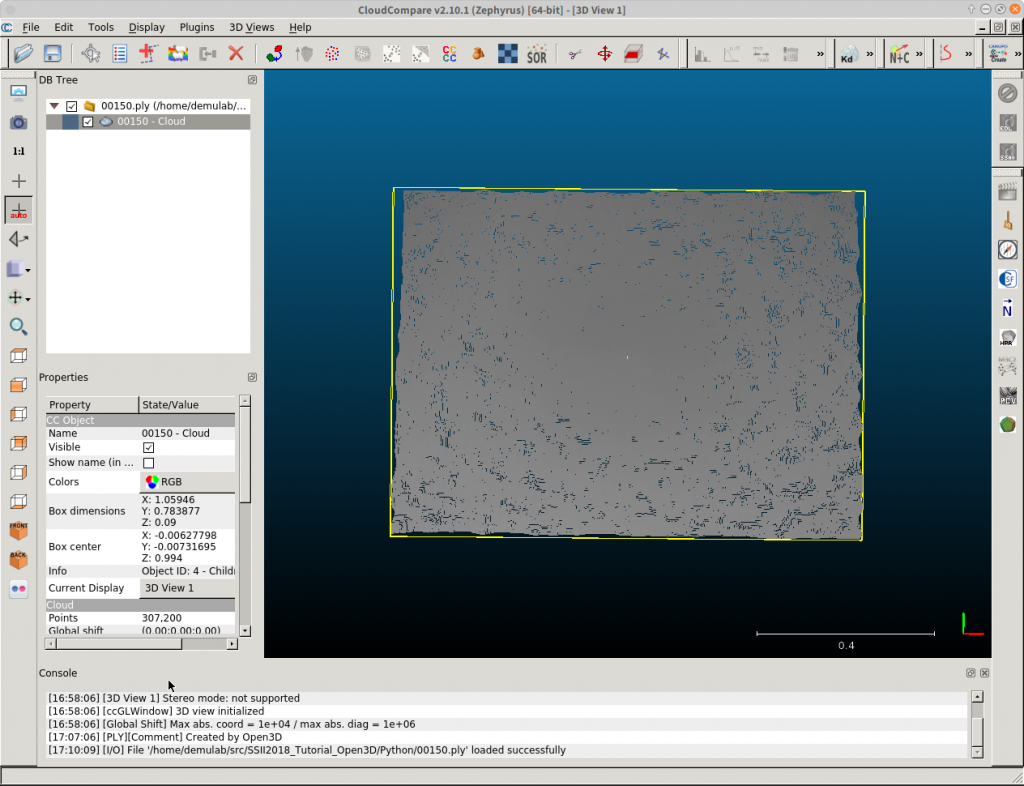
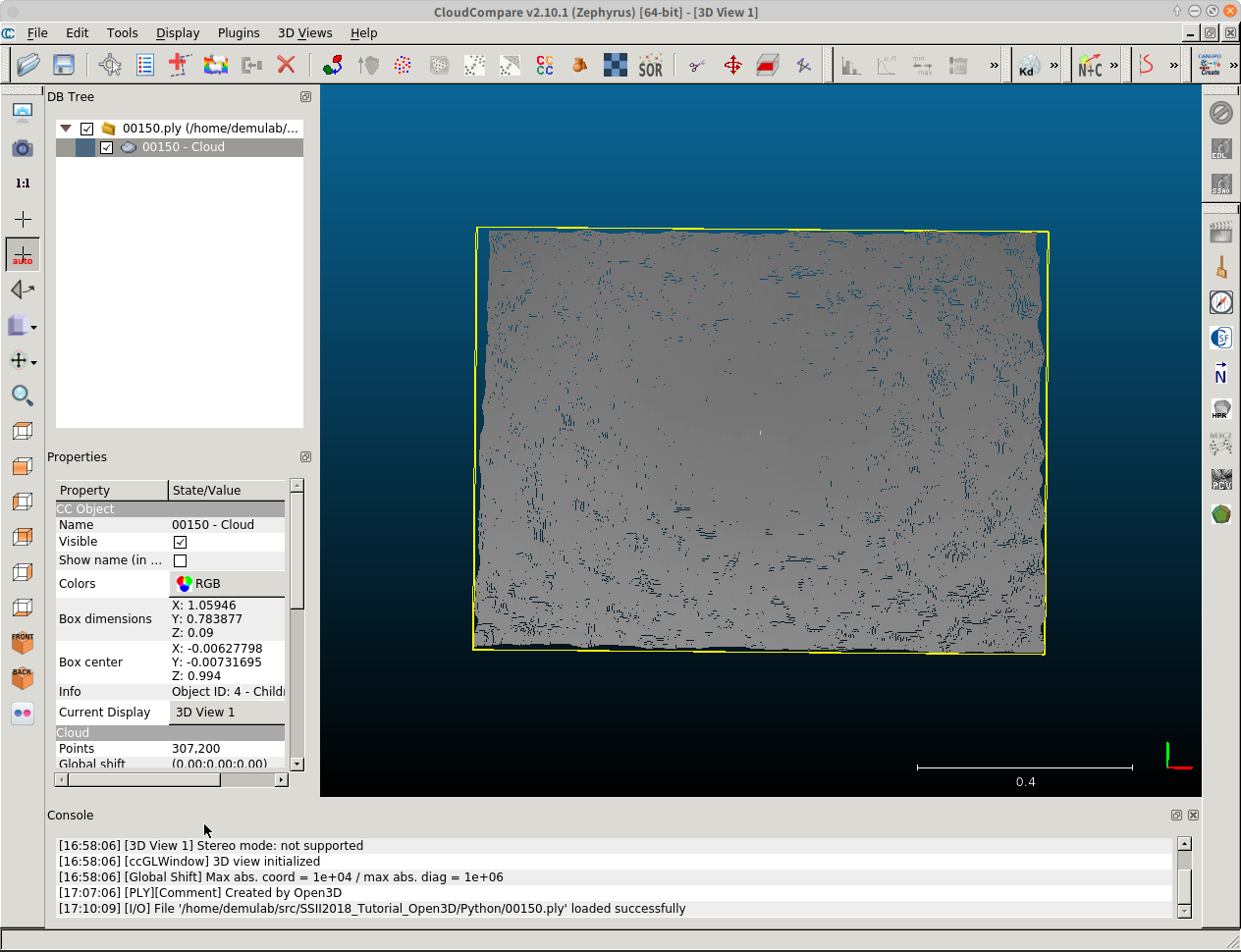
- 平面推定。推定する点群をクリックする。選択された点群領域が黄色で表示される。
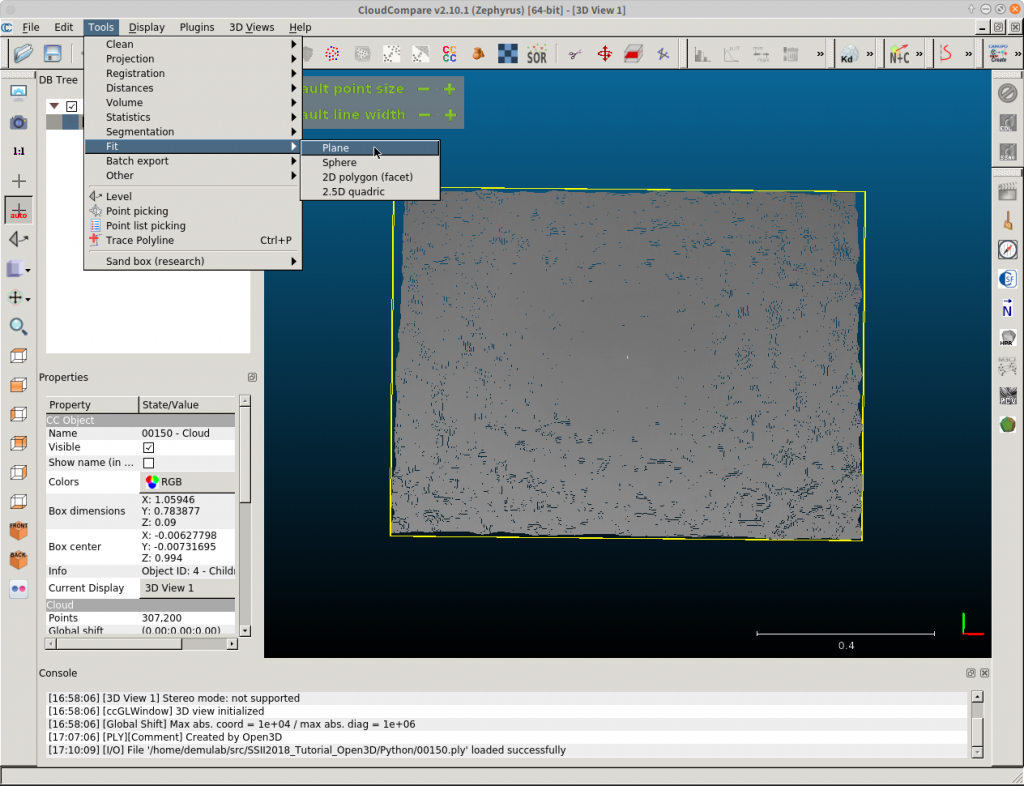
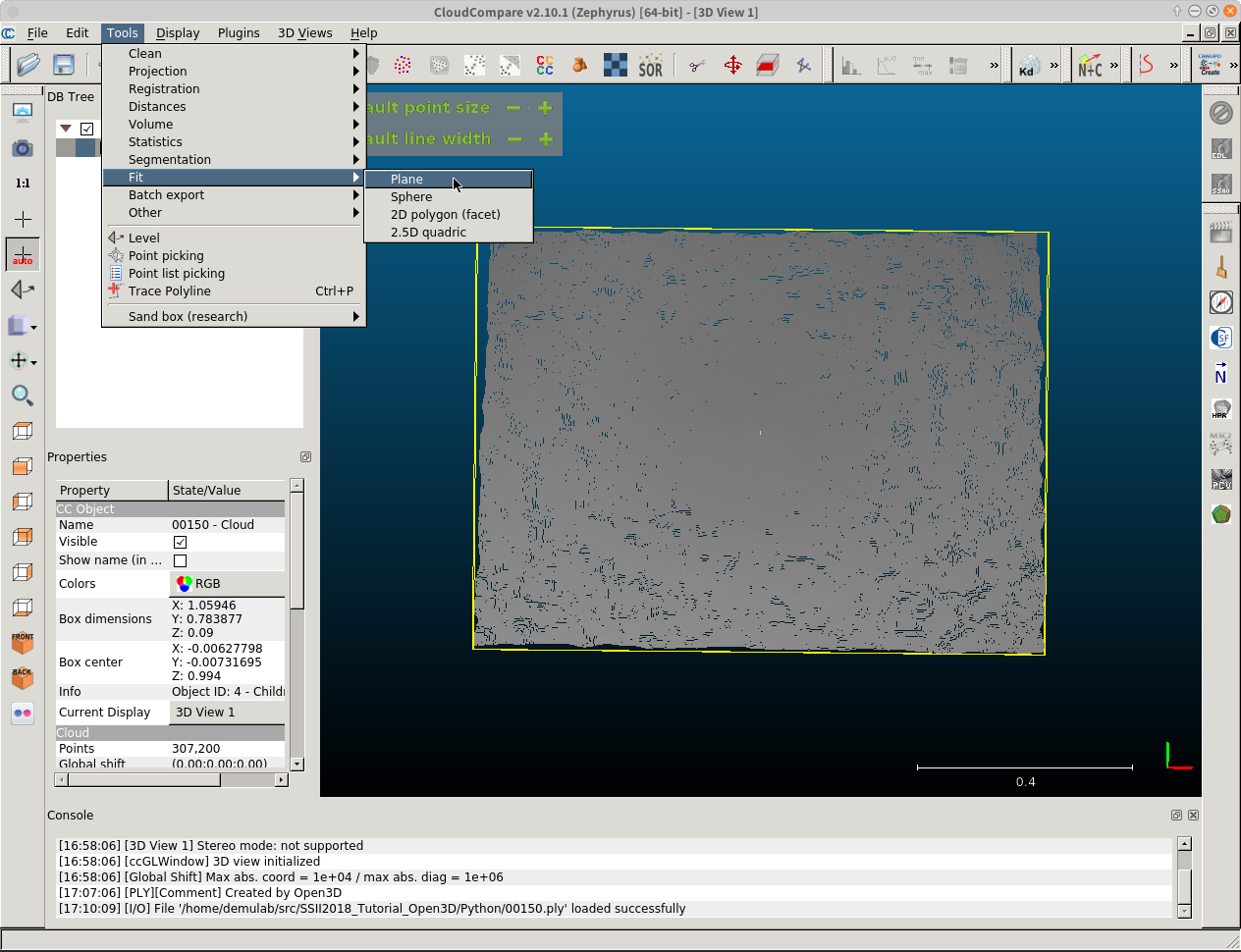
- Tools→Fit→Plane を選択
- 点群にフィットする平面が計算される。

点群と平面の距離計算
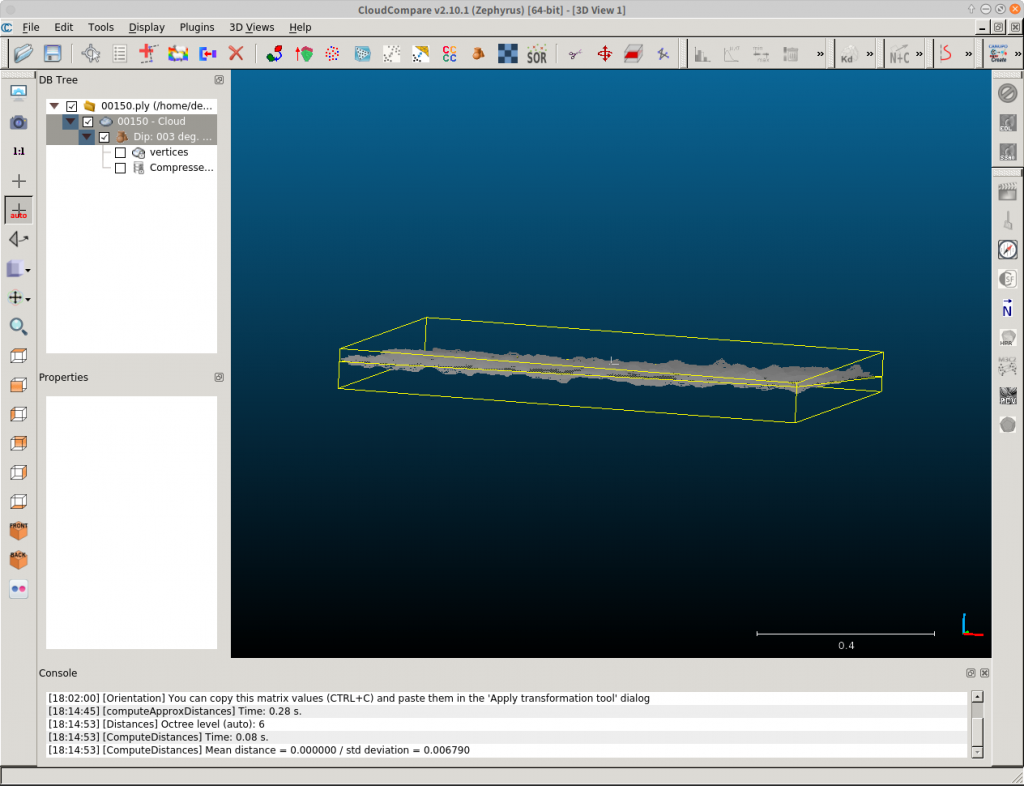
- ここでは、推定された平面と各点群との距離の標準偏差を計算する。標準偏差が小さいほど点群は平面に近いことになる。計算するために、点群と平面を選択する。下画面左欄DB Treeの上から2番目(00150-Cloud)と3番目の項目(Dip: 003 deg)をシフトキーを押しながらクリックする。両方とも選択されるとグレーで表示される。
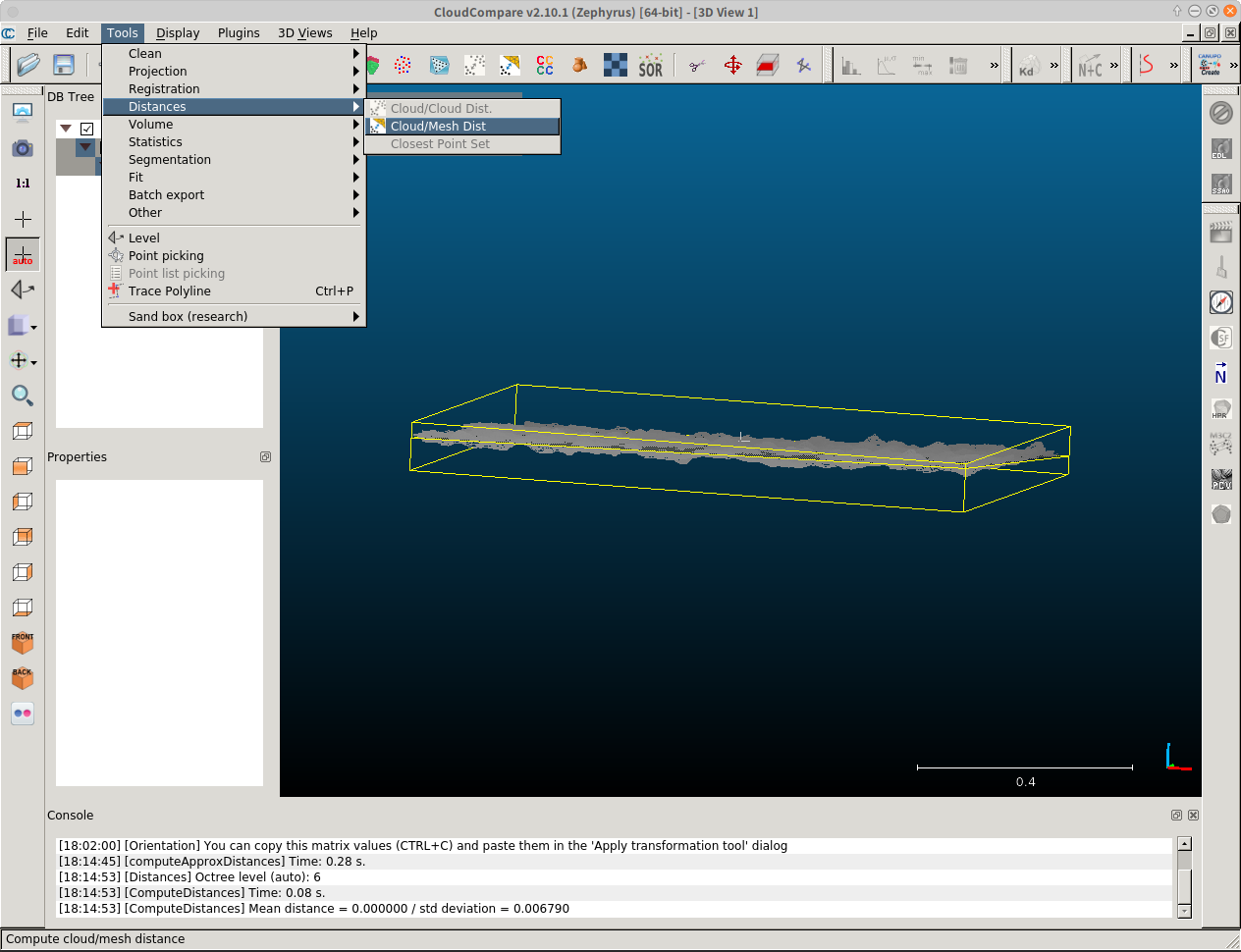
- Tools→Distances→Cloud/Mesh Distを選択
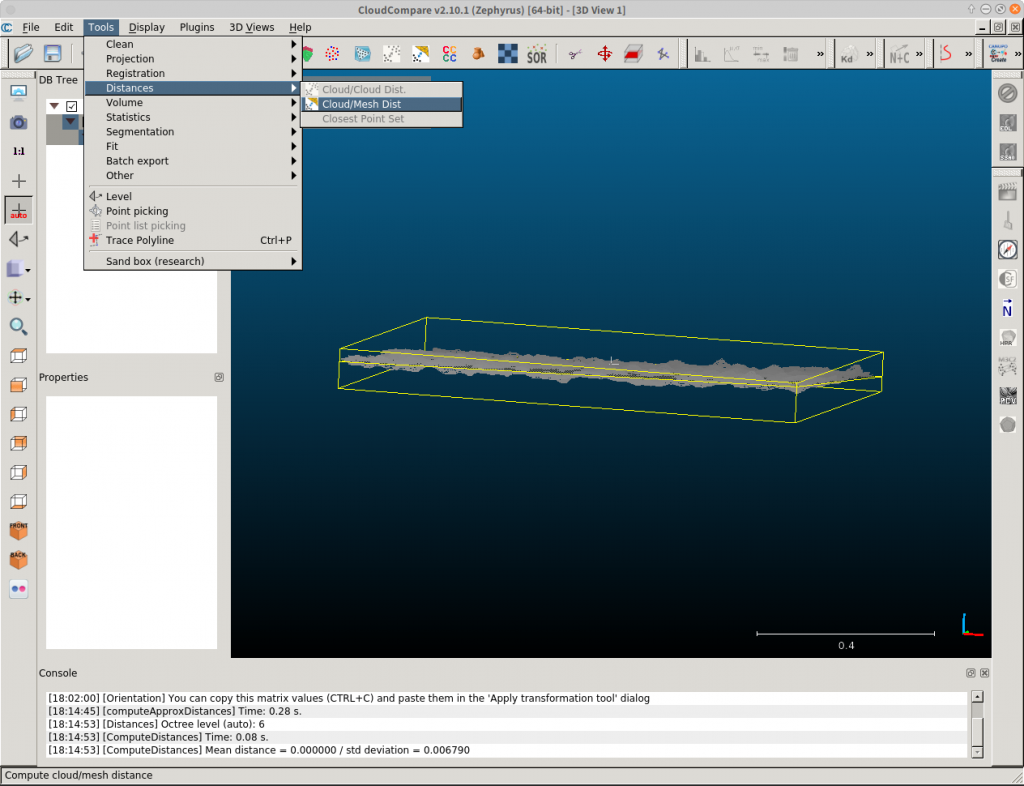
- Computeをクリックし、OKをクリックする。

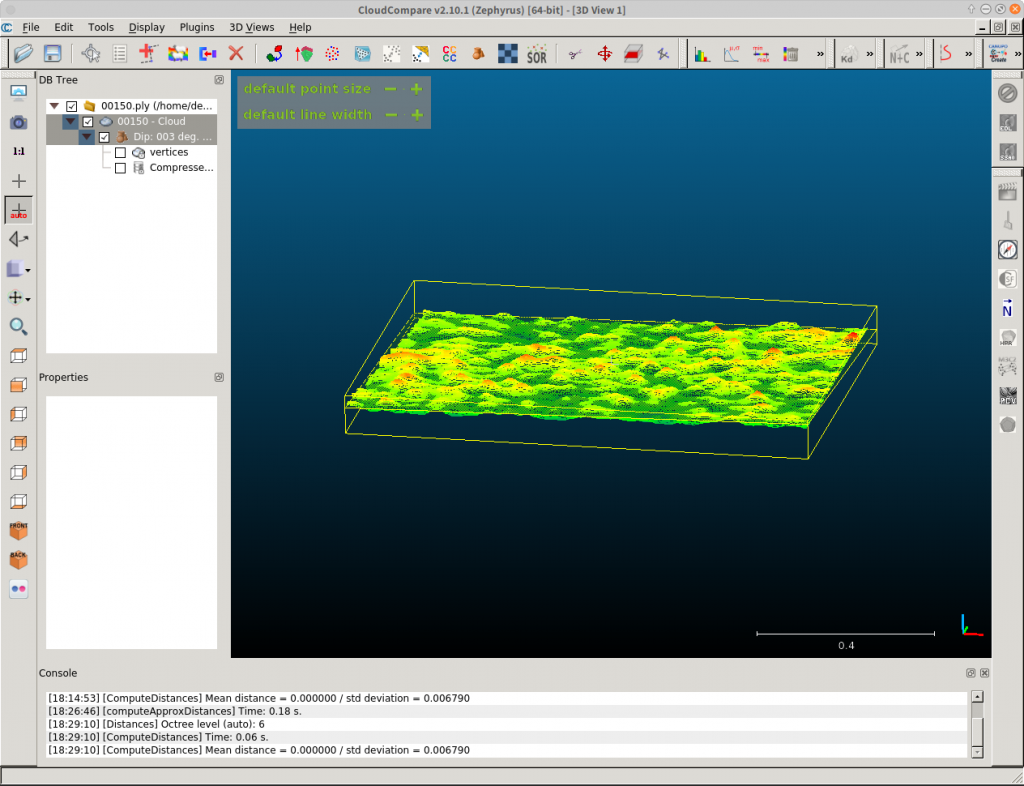
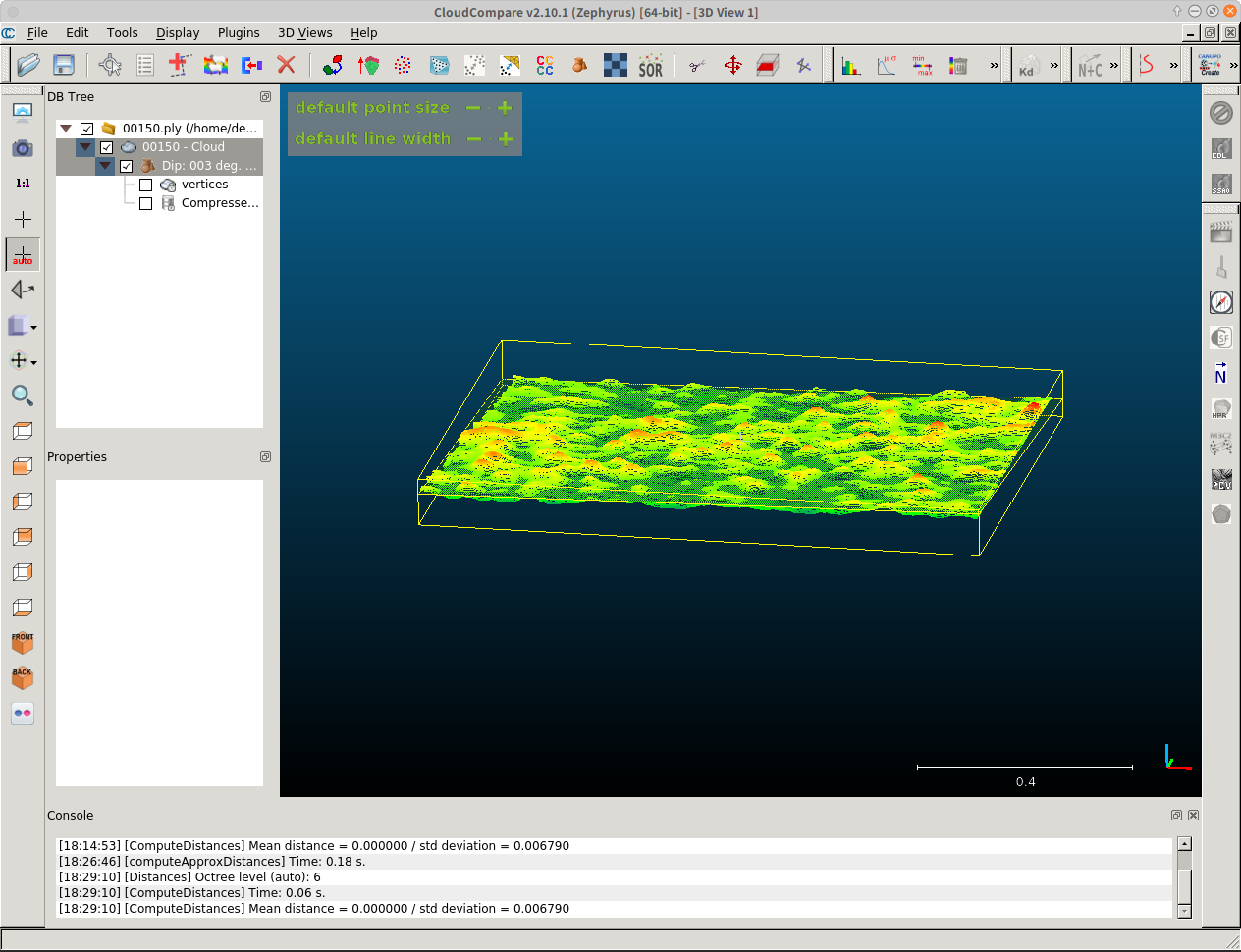
- 計算結果が下のConsoleに表示される。このRealSenseから取得したデータはStd deviation(標準偏差)が0.006790 [m]となった。単位系はmmにすると約6.8 [mm]である。
- 同様にしてStructure Coreから取得した点群で計算した結果が次のとおり。Std deviation(標準偏差)が1.810365 [mm]となった。なお、Structure Coreから取得したデータの単位系はmm、RealSenseの単位系はmなので1000倍違う。画面下にスケールがあるのでそれでわかる。Structure Coreのデータもここから取得できる。

RealSense D453iとStructure Coreとの比較
- 結果をまとめると次になる。両者の画像を見ると一目瞭然である。定量的にもRealSenseの方が約3.75倍標準偏差が大きく凸凹していることがわかる。
- RealSense D435i: 標準偏差 6.79 [mm]
- Structure Core: 標準偏差 1.81 [mm]
終わり


コメント