Occipital社のRGB-DセンサStructure Core (color)を昨年12月の国際ロボット展で知った。商社の話によるとRealSenseの元開発者がその問題点を解決したのがこの製品らしい。これは買うしかないと思い2月初めに入手できた。コロナ騒動で暇になったのでインストールして試してみた。この記事はそのメモ。ネット上でほとんど情報がないので少し試行錯誤した。なお、この手順は以下の参考資料に基づいた。
- 参考資料
- ~/src/StructureSDK-CrossPlatform-0.7.3-ROS/Documentation/index.html
- 環境
- Xubuntu18.04 (Vayager 18.04)
- ROS melodic
- gcc 7.5.0
- pcl 1.8.1+dfsg1-2ubuntu2.18.04.1
- SDKの入手:以下からDeveloper Programに加入する。氏名、メールアドレスを入力すると、ダウンロード先のリンクがはられたメールが送られてくるので~/Downloadsにダウンロードする。
- 展開
- $ cp ~/Downloads/StructureSDK-CrossPlatform-0.7.3-ROS.zip ~/src
- $ cd ~/src
- $ unzip StructureSDK-CrossPlatform-0.7.3-ROS.zip
- USBデバイスへのアクセス許可:udevのルールを設定する。
- $ sudo ./DriverAndFirmware/Linux/Install-CoreDriver-Udev-Linux.sh
- ビルド
- $ ./Scripts/build.sh
- ROSドライバ
- インストール
- $ cd ~/catkin_ws/src
- $ cp -r ~/src/StructureSDK-CrossPlatform-0.7.3-ROS .
- $ cd StructureSDK-CrossPlatform-0.7.3-ROS/ROS
- $ chmod 755 to_ros1.sh
- $ source to_ros1.sh source to_ros1.sh BUILD_EXAMPLES
- 備考:exampleコードもビルドするためには以下のコマンドを実施する。ただ、私の環境ではエラーが出た。
- $ source to_ros1.sh BUILD_EXAMPLES
- 他のパッケージ(depth_image_proc、OpenCV、PCL、Cartographer)と一緒に使うときはここを参照。
- 備考:exampleコードもビルドするためには以下のコマンドを実施する。ただ、私の環境ではエラーが出た。
- ビルド
- $ cd ~/catkin_ws
- $ catkin build (もしくは、catkin_make)
- ROS環境の初期化
- $ source ./devel/setup.bash
- インストール
- 実行
- ドライバのみ
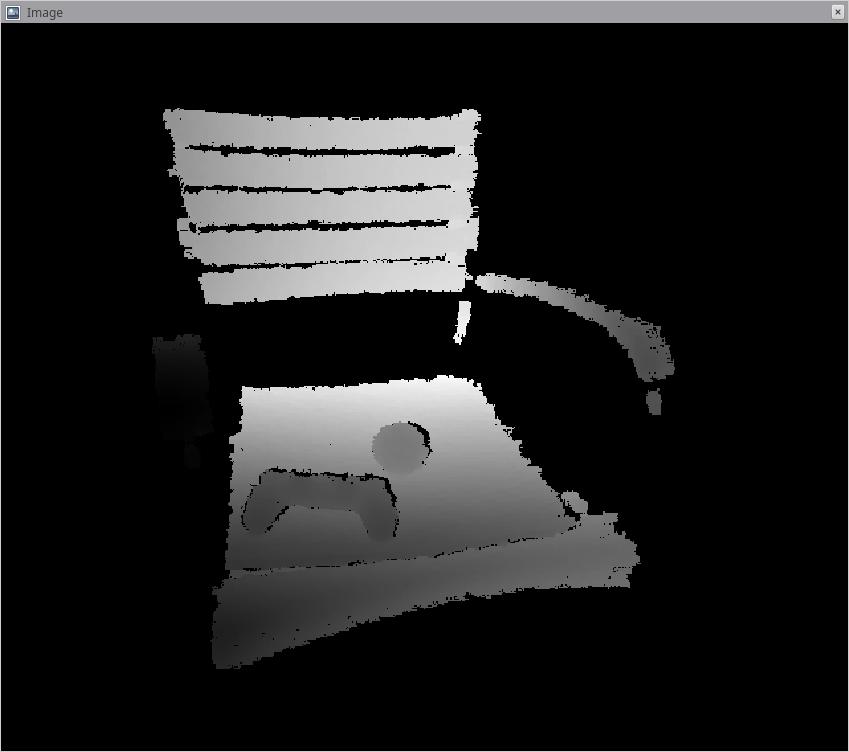
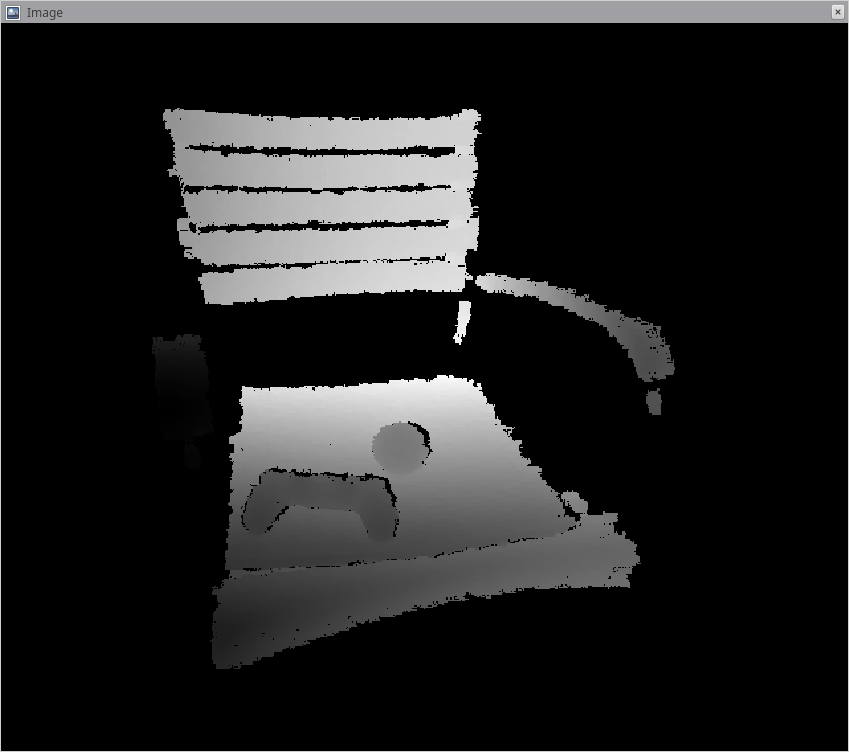
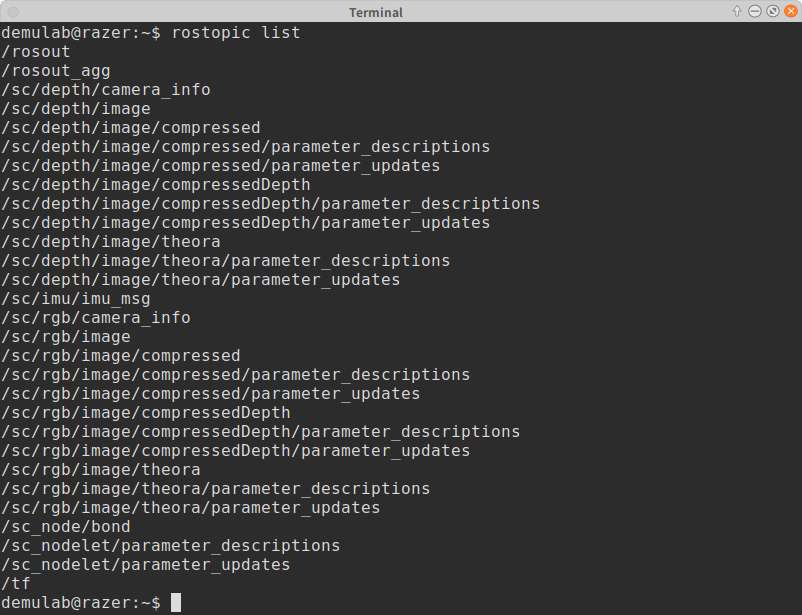
$ roslaunch structure_core_ros_driver sc.launch- 実行すると次のトピックがpublishされる。
- ドライバとRviz
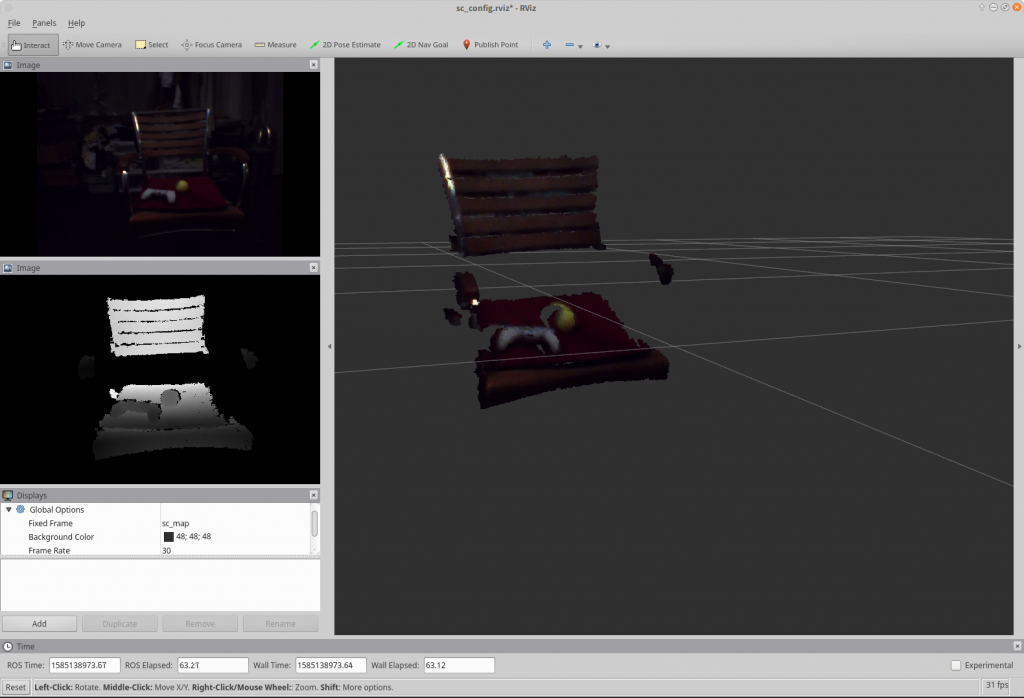
$ roslaunch structure_core_ros_driver sc_rviz.launch- 実行するとRvizが立ち上がり次のようなウインドウが開く。depthイメージの美しさはどうでしょうか。設定のパラメータもいろいろあるのでより美しくなるかもしれない次はRealSenseと比較してみよう。
- ドライバのみ

終わり

コメント