The demura.net team official web site
- Introduction
The Demura Research Laboratory team has been participating in the Ro-boCup@Home league of the RoboCup Japan Open since 2012, and this is our first attempt to participate in the RoboCup@Home league of the World Championship. The current team advisor, Professor Kosei Demura, participated as an advisor for the WinKIT team in the World Championship in the Middle-Size League (MSL) in 1999, 2000, 2002-2006, 2009, and the Humanoid League in 2010. From 2002 to 2004, the WinKIT team held the title of vice world champion.
The MSL is very attractive, fun, and enthusiastic for participants and a large audiences. However, the robots of MSL are not useful and helpful to people directly. This caused our team to reflect upon its goals, thus our team decided to develop two kinds of human support robots.
- Robot
We have been developing 2 kinds of human support robots. One is a childcare robot for children and another is a wheelchair robot for the elderly. To foster the research and development, the Demura Research Laboratory has been participating in RoboCup@Home since 2012 and Tsukuba Challenge since 2008.
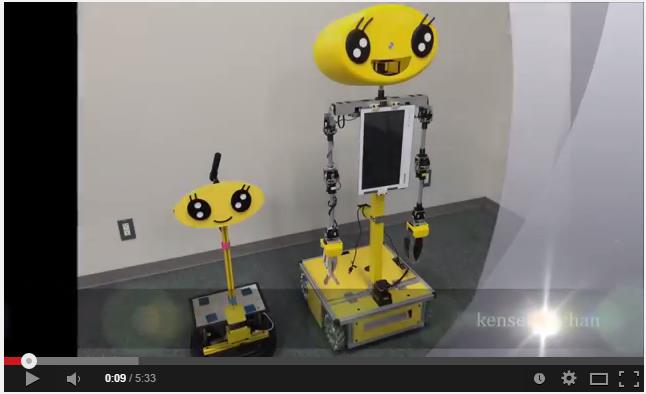
(1) Childcare robots: Kenseiko-chan (left) and Kenseiko-chan mobile (right)
Kenseiko-chan is fully developed by our lab, she has an omni-directional base with Mecanum wheels, and Kenseiko-chan mobile is based on the Kobuki base. Exterior is very important, especially for child care robots, so both robots have lovely faces and their color is vivid yellow. As shown in the following figures, you can easily understand that exterior is crucial. Exterior design of robots should be more considered in RoboCup@Home league. We have been engaging in design of robots for children and the elderly. The technical information of these robots is described in our Team Description Paper.

| Kenseiko-chan | Kenseiko-chan Mobile | |
| Height [m] | 1.35 | 0.7 |
| Width [m] | 0.50 | 0.3 |
| Length [m] | 0.50 | 0.3 |
| Weight [kg] | 19.0 | 8.0 |
| Max speed [m/s] | 0.7 | 0.7 |
| D.O.F | 12 | 3 |
(2) A wheelchair robot: Kensei
We have been developing a wheelchair robot and a driver assist technology system for the elderly.

- Team Description Paper
- Publications
- Journal
- Demura, K., Komoriya Y. “A Navigation Method using the Mutual Feedback of Waypoints and Self-positions,” Advanced Robotics, Vol.26, Issue14, pp.1677-1691 (2012) [Manuscript]
- Demura, K., Sakamoto, T., Asano, Y. and Matsuishi, M. “Enhancing Student Engineering, Personal, and Interpersonal Skills Through Yumekobo Projects,” Journal of Robotics and Mechatronics, Vol.23, No.5, pp.811-821(2011)
- 出村公成,中川祐:“全方位カメラを用いたテンプレートマッチングに基づくモンテカルロ位置同定法”,日本ロボット学会誌,Vol.27,No.2,pp.249-257 (2009)
- Book
- 出村公成(分担執筆):“5編2章 物理エンジン”, 日本ロボット学会編 ロボットテクノロジー,pp.216-219, オーム社 (2011)
- 出村公成(分担執筆):“9.2.1節 Open Dynamics Engine”, 松原,松野,稲見,野田,大須賀編著 ロボット情報学ハンドブック,pp.582-592, ナノオプトニクスエナジー (2010)
- Conference
- 西川徹,出村公成:“3次元レーザ式測域センサを用いた障害物検出システムの開発”, ロボティクス・メカトロニクス講演会2014, 3P1-X01 (2014)
- 菅原 啓, 市野陽太,岡本拓真,西川 徹,山岸卓央,河原貴軌,山崎亮一,出村公成 :“つくばチャレンジ 2013における 金沢工 大 demura.netチーム の開発”, つくばチャレンジ2013参加レポート集, p.18-19 (2014)
- 市野陽太,出村公成:“つくばチャレンジ2013におけるロボットリモート監視システムの開発”, 第14回計測自動制御学会システムインテグレーション部門講演会論文集, 1A3-2 (2013)
- 菅原啓,出村公成:“道路領域検出に基づくウェイポイント推定”, 第14回計測自動制御学会システムインテグレーション部門講演会論文集, 1A1-6 (2013)
- 竹迫翔平,出村公成:“特徴量マッチングを用いたウェイポイント推定”, 第30回日本ロボット学会学術講演会, 2F3-6 (2012)
- 出村公成:“つくばチャレンジの歩みとdemura.netチームの取り組み”, 電子情報通信学会クラウドネットワークロボット研究会, 信学技報告 Vol.112, No.105, CNR2012-2 (2012)
- 市野陽太,出村公成:“物理計算エンジンODEにCADデータを読込ますプログラムの開発”, ロボティクス・メカトロニクス講演会’12, 2A2-E07 (2012)
- 出村公成:“ロボカップジュニア理念実現のためのロボットスクール”, 第29回日本ロボット学会学術講演会, 2C2-2 (2011)
- 竹迫翔平,出村公成:“ポールスターアルゴリズムの特徴量抽出を拡張した自己位置同定”, ロボティクス・メカトロニクス講演会’11, 2A1-M07 (2011)
- 出村公成:“物理計算エンジンにおけるOpen Dynamics Engineの位置付け”, 第11回計測自動制御学会システムインテグレーション部門講演会論文集, 1B2-1 (2010)
- 山澤貴史,出村公成:“自律移動ロボットの動的な走行経路生成”, 第11回計測自動制御学会システムインテグレーション部門講演会論文集, 1A3-5 (2010)
- 細川和真,出村公成:“動力学エンジンODE用グラフィックスライブラリの開発 -Drawstuff 上位互換ライブラリ-(第5報), 第28回日本ロボット学会学術講演会, 3L2-2 (2010)
- 市川修司,出村公成:“照明変化にロバストなロボットビジョンシステム”, 第28回日本ロボット学会学術講演会, 3I1-3 (2010)
- 小林秀成,出村公成:“円検出によるセンターラインの特定を用いた自己位置同定”, 第28回日本ロボット学会学術講演会, 2Q1-5 (2010)
- 出村公成:“ロボットの自己位置推定-つくばチャレンジ&ロボカップの事例から-”,第8回レーザ計測イノベーション勉強会 (2010)
- 出村公成、細川和真:“動力学計算エンジンODE用グラフィクスライブラリの開発(第4報)-上位互換ライブラリirrDrawStuffのリリース-, ロボティクス・メカトロニクス講演会’10, 1P1-G28 (2010)
- 出村公成, 山澤貴史, 島野広之, 山内啓右:“電動車椅子をベースとした自立移動ロボットの開発”, つくばチャレンジ2009 開催記念シンポジウム参加レポート集, p.14-16 (2010)
- Journal
- Software
- RoboCup Japan Open 2014 @Home Simulation League (3rd place)
- SourceCode.tgz by Kensei and Kosei Demura
- RoboCup@Home 2014: What did you say ?
- The Book: Robot Simulation with Open Dynamics Engine (by Kosei Demura)
- Sample programs in the book
- PowerPoint for lectures
- RoboCup Japan Open 2014 @Home Simulation League (3rd place)
- Team
- Adviser: Kosei Demura
- Member: Toru Nishikawa (Leader), Wataru Taki, Kiyohiro Yamamori, Toru Takeyama, Marco Valentino, Kensei Demura
- Previous participation in RoboCup@Home
- RoboCup Japan Open 2012
- @Home: Real Robot League
- RoboCup Japan Open 2013
- @Home: Real Robot League
- @Home: Simulation League (only in Japan Open)
- RoboCup Japan Open 2014
- @Home: Real Robot League
- @Home: Simulation League (only in Japan Open): 3rd place (Team name: Yumekobo Junior)
- RoboCup Japan Open 2012