RealSense D435iをROS Melodicで使うメモ。D435iはD435にIMUが搭載された新しい機種。D435と同じようにインストールできた。ROSのラッパーもありすぐ使える。このメモはカラー画像の表示まで。なお、ビルドコマンドはcatkin_makeではなくcatkin buildを使用しているので、catkin_makeを使っている方は適宜読み替えてください。また、記事に書いていますが参考したドキュメントどおりcatkin installと不具合が出た学生がいたのでそのコマンドは省略しました。
環 境
- Razer Blade 15
- Ubuntu18.04
- ROS Melodic
- RealSense SDK 2.0
RealSense SDKのインストール
- このページのとおり実施すればよい。以下の手順はその簡単な日本語訳とささやかな補足。
- サーバーの公開鍵を登録
$ sudo apt-key adv --keyserver keys.gnupg.net --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE
- リポジトリにIntelサーバーを追加
$ sudo add-apt-repository "deb http://realsense-hw-public.s3.amazonaws.com/Debian/apt-repo bionic main" -u
- リポジトリのリストと使えるパッケージをリフレッシュする
$ sudo apt update
- ライブラリのインストール
$ sudo apt install librealsense2-dkms$ sudo apt install librealsense2-utils
- 開発用に追加のパッケージをインストールする
$ sudo apt install librealsense2-dev$ sudo apt install librealsense2-dbg
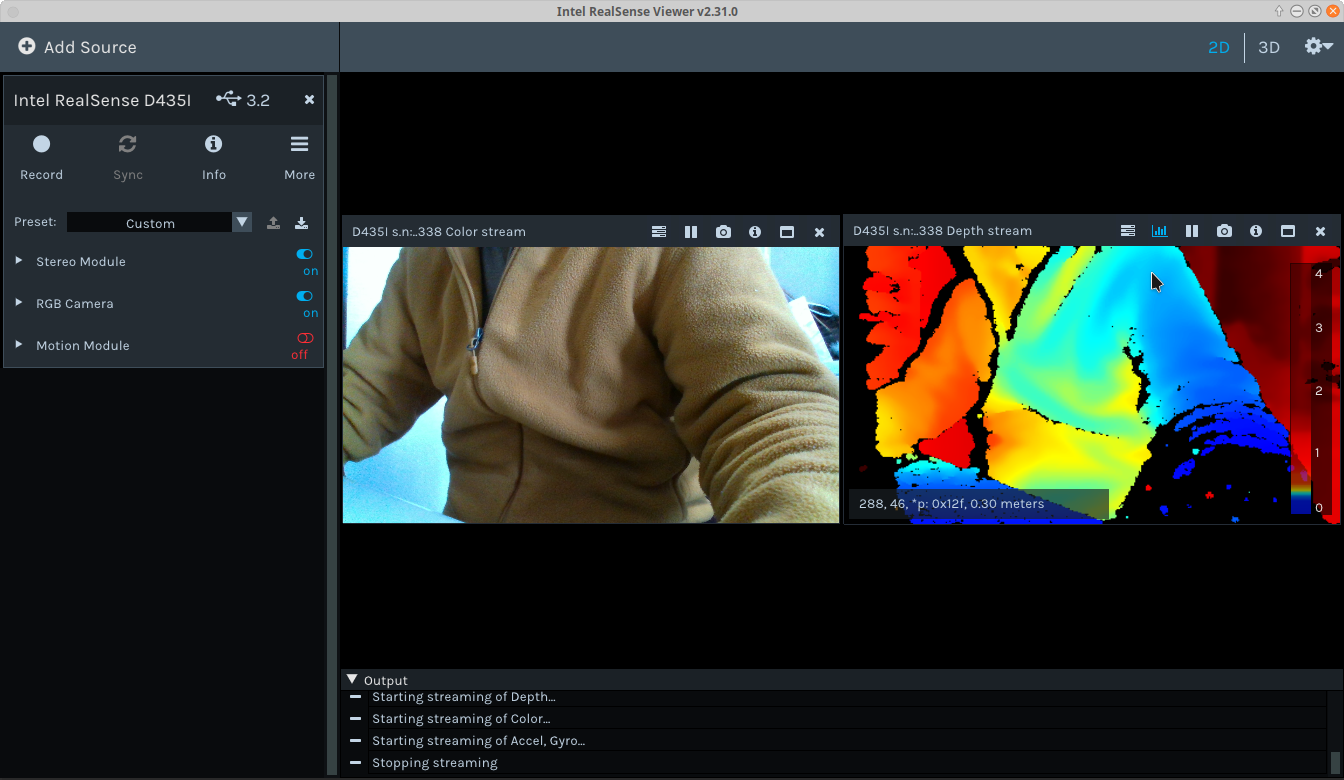
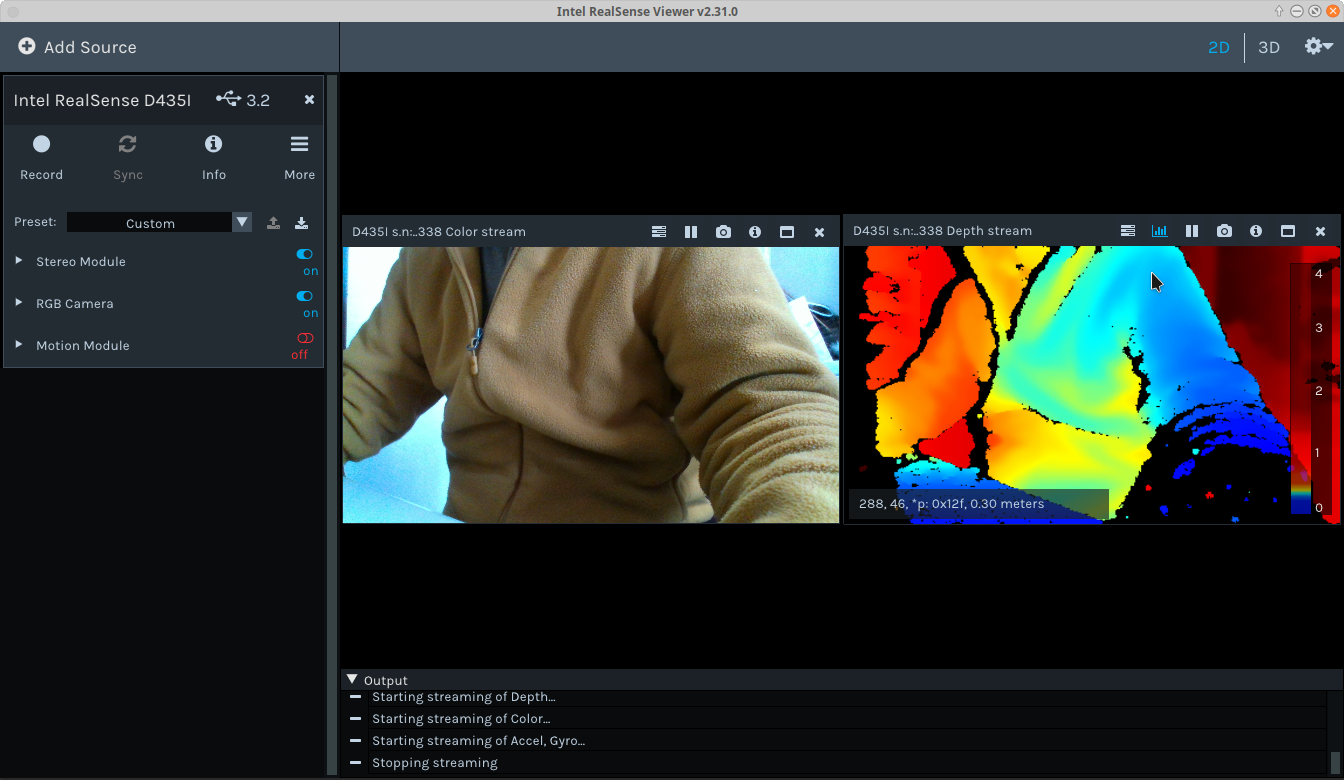
- RealSenseのUSBケーブルを抜き差しして以下のコマンドを実行する。ウインドウが開くので、左サイドバーにあるStereo ModuleとRGB Cameraをoffからonにすると、上のような画像が現れる。
$ realsense-viewer
パッケージのアップグレード
- 以下の手順でアップグレードする。ここでは上でインストールしたパッケージだけアップグレードする。アップグレード可能なすべてのパッケージをアップグレードすると稀に動かなくなるパッケージがあるのでこの方法はお勧め。
$ sudo apt update$ sudo apt --only-upgrade install librealsense2-utils librealsense2-dkms librealsense2-dev librealsense2-dbg
ROSラッパーのインストール
- https://github.com/intel-ros/realsense/releases からSource code (realsense-2.0.3.tar.gz)を~/catkin_ws/srcにダウンロードする
- $ cd ~/catkin_ws/src
- $ git clone https://github.com/pal-robotics/ddynamic_reconfigure.git
- $ catkin build
- $ git clone https://github.com/IntelRealSense/realsense-ros.git
- $ catkin build
- 参考元の説明を元に次のようにcatkin installすると不具合が出た学生がいたので変更した。
$ catkin build -DCATKIN_ENABLE_TESTING=False -DCMAKE_BUILD_TYPE=Release$ catkin install
- 参考元の説明を元に次のようにcatkin installすると不具合が出た学生がいたので変更した。
実行
$ roslaunch realsense2_camera rs_camera.launch- 解像度は640×480 pixel。変更したいときはrs_camera.launchの中を書き換える。
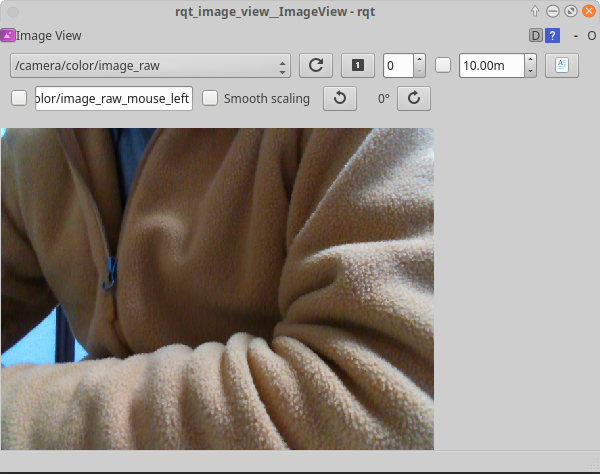
- カメラ画像を表示するimage_viewノードは、melodicではaptでインストールできないので、rqt版のrqt_image_viewをインストールする。
$ sudo apt install ros-melodic-rqt-image-view
$ rosrun rqt_image_view rqt_image_view- 左上の選択ボックスからトピック/camera/color/image_rawを選択して、下のように画像が表示されれば成功。
トピック
~/catkin_ws$ rostopic list /camera/color/camera_info /camera/color/image_raw /camera/color/image_raw/compressed /camera/color/image_raw/compressed/parameter_descriptions /camera/color/image_raw/compressed/parameter_updates /camera/color/image_raw/compressedDepth /camera/color/image_raw/compressedDepth/parameter_descriptions /camera/color/image_raw/compressedDepth/parameter_updates /camera/color/image_raw/theora /camera/color/image_raw/theora/parameter_descriptions /camera/color/image_raw/theora/parameter_updates /camera/depth/camera_info /camera/depth/image_rect_raw /camera/depth/image_rect_raw/compressed /camera/depth/image_rect_raw/compressed/parameter_descriptions /camera/depth/image_rect_raw/compressed/parameter_updates /camera/depth/image_rect_raw/compressedDepth /camera/depth/image_rect_raw/compressedDepth/parameter_descriptions /camera/depth/image_rect_raw/compressedDepth/parameter_updates /camera/depth/image_rect_raw/theora /camera/depth/image_rect_raw/theora/parameter_descriptions /camera/depth/image_rect_raw/theora/parameter_updates /camera/extrinsics/depth_to_color /camera/extrinsics/depth_to_infra1 /camera/extrinsics/depth_to_infra2 /camera/infra1/camera_info /camera/infra1/image_rect_raw /camera/infra1/image_rect_raw/compressed /camera/infra1/image_rect_raw/compressed/parameter_descriptions /camera/infra1/image_rect_raw/compressed/parameter_updates /camera/infra1/image_rect_raw/compressedDepth /camera/infra1/image_rect_raw/compressedDepth/parameter_descriptions /camera/infra1/image_rect_raw/compressedDepth/parameter_updates /camera/infra1/image_rect_raw/theora /camera/infra1/image_rect_raw/theora/parameter_descriptions /camera/infra1/image_rect_raw/theora/parameter_updates /camera/infra2/camera_info /camera/infra2/image_rect_raw /camera/infra2/image_rect_raw/compressed /camera/infra2/image_rect_raw/compressed/parameter_descriptions /camera/infra2/image_rect_raw/compressed/parameter_updates /camera/infra2/image_rect_raw/compressedDepth /camera/infra2/image_rect_raw/compressedDepth/parameter_descriptions /camera/infra2/image_rect_raw/compressedDepth/parameter_updates /camera/infra2/image_rect_raw/theora /camera/infra2/image_rect_raw/theora/parameter_descriptions /camera/infra2/image_rect_raw/theora/parameter_updates /camera/realsense_ros_camera_manager/bond /camera/realsense_ros_camera_manager/parameter_descriptions /camera/realsense_ros_camera_manager/parameter_updates /rosout /rosout_agg /tf_static
以上

コメント