準 備
- happy_miniを使う場合は,次のGithubのサイトからHappy Mini TurtleBot3 Simulationsパッケージを次のコマンドでクローンしておく必要があります.turtlebot3 burger, waffle,waffle_piを使う場合は必要ありません.
$ cd ~/colcon_ws/src$ git clone https://github.com/demulab/happy_mini_turtlebot3_sim.git$ cd ~/colcon_ws$ colcon build --symlink-install
- Navigation2のインストール
$ sudo apt -y install ros-foxy-navigation2$ sudo apt -y install ros-foxy-nav2-bringup
- slam_toolboxのインストール
$ sudo apt -y install ros-foxy-slam-toolbox
シミュレータの起動
次のコマンドでGazeboシミュレータを起動しましょう.ここでは,Turtlebot3 House環境を使います.
$ export TURTLEBOT3_MODEL=happy_mini$ ros2 launch turtlebot3_gazebo turtlebot3_house.launch.py
Slam_toolboxノードの起動
slam_toolboxにはasync_slam_toolbox_nodeとsync_slam_toolbox_nodeの2種類があります.ロボットを動かしながらリアルタイムで地図を作成するときはasync_slam_toolbox_nodeノード,rosbag2などで保存したセンサデータから品質の高い地図を作成するときはsync_slam_toolbox_nodeノードを使います.
実際にコマンドを実行するときはローンチファイルを使います.リアルタイム(オンライン)で地図を生成するときはonline_async_launch.py,オフラインで品質の高い地図を作るときはoffline_launch.pyを使います.
$ export TURTLEBOT3_MODEL=happy_mini$ ros2 launch slam_toolbox online_async_launch.py
遠隔操作ノードの起動
ロボットをキー操作により制御するために次のコマンドで遠隔操作ノードを起動しましょう.
$ export TURTLEBOT3_MODEL=happy_mini$ ros2 run turtlebot3_teleop teleop_keyboard
Rviz2の起動
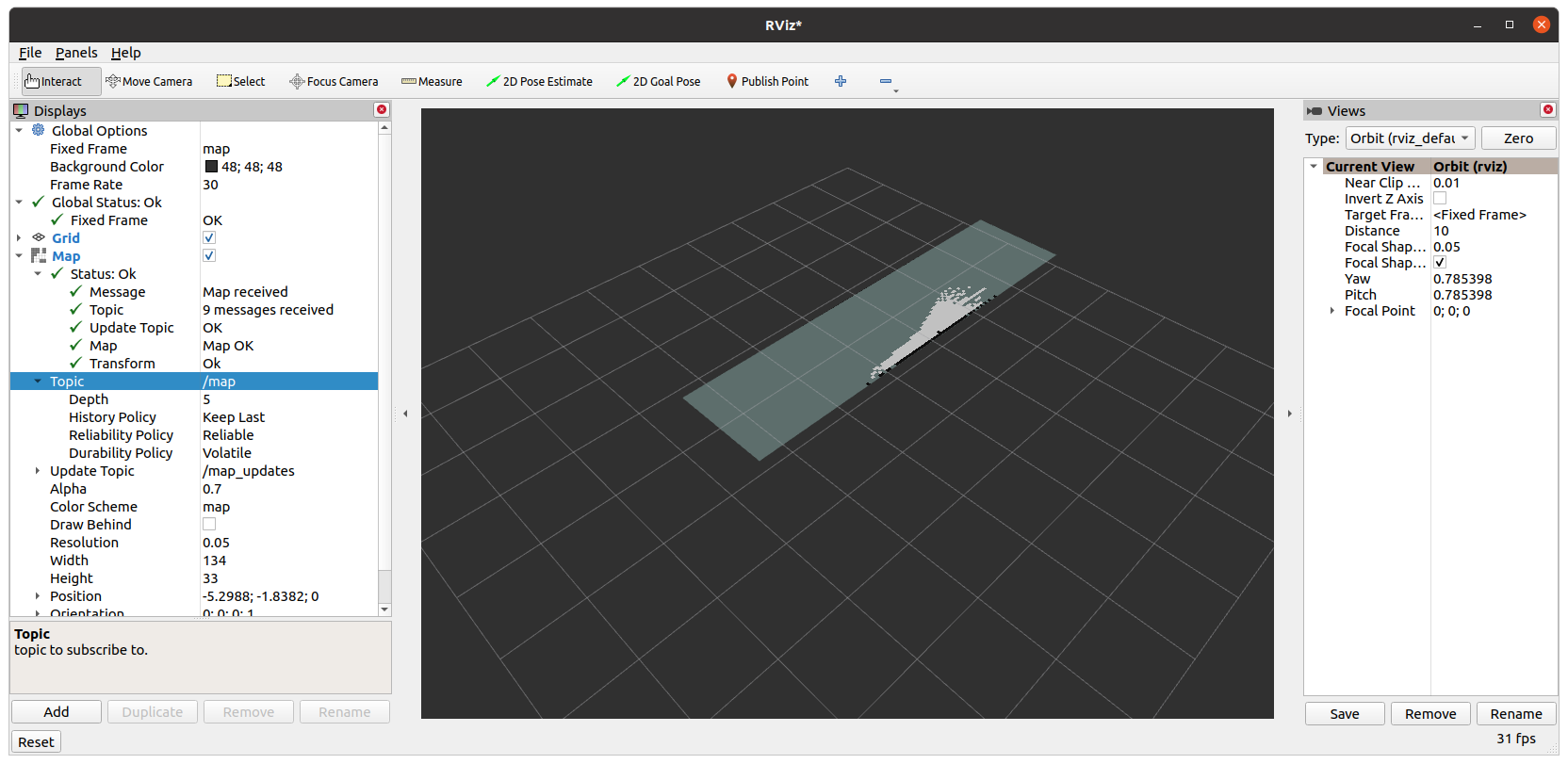
地図の生成をリアルタイムで見るためにRviz2を起動します.地図情報は/mapトピックで送られてきます.
- $ rviz2
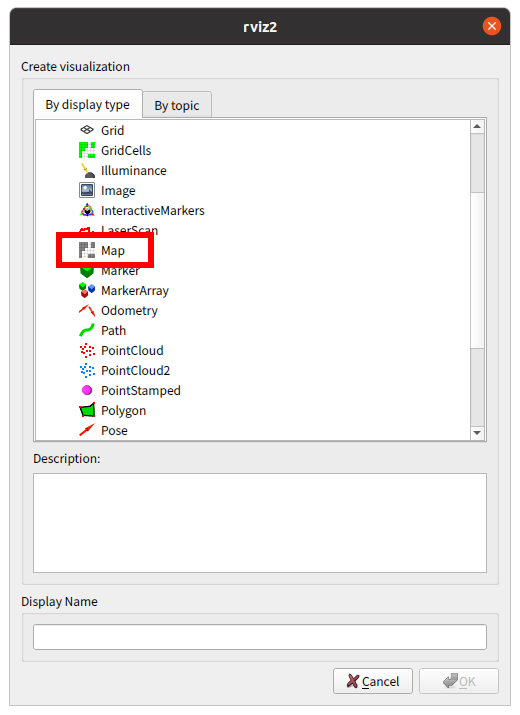
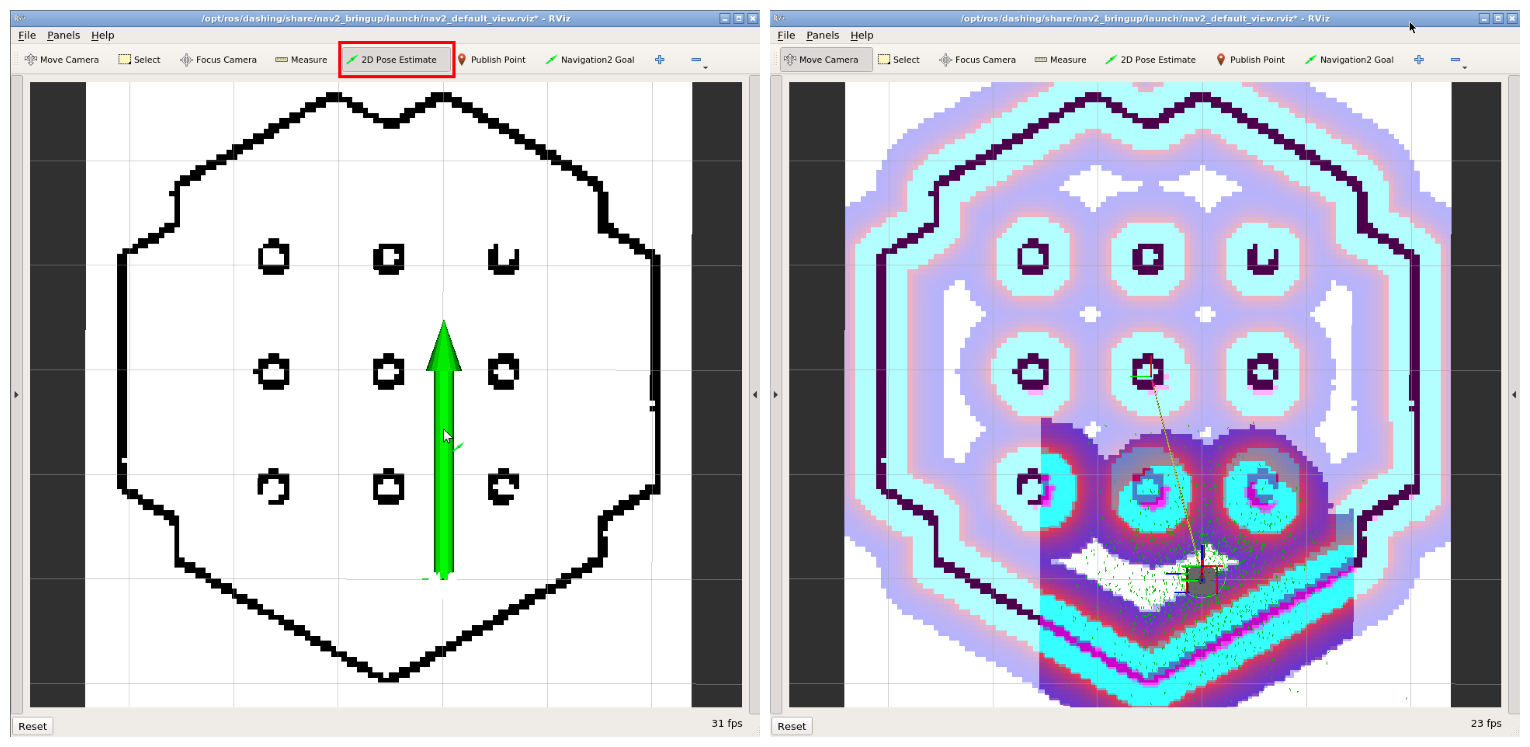
そのままでは地図が表示されないので,左下の[Add]をクリックして,Mapを選択して,そのTopic名を”/map”とすると下図のように地図が表示されます.
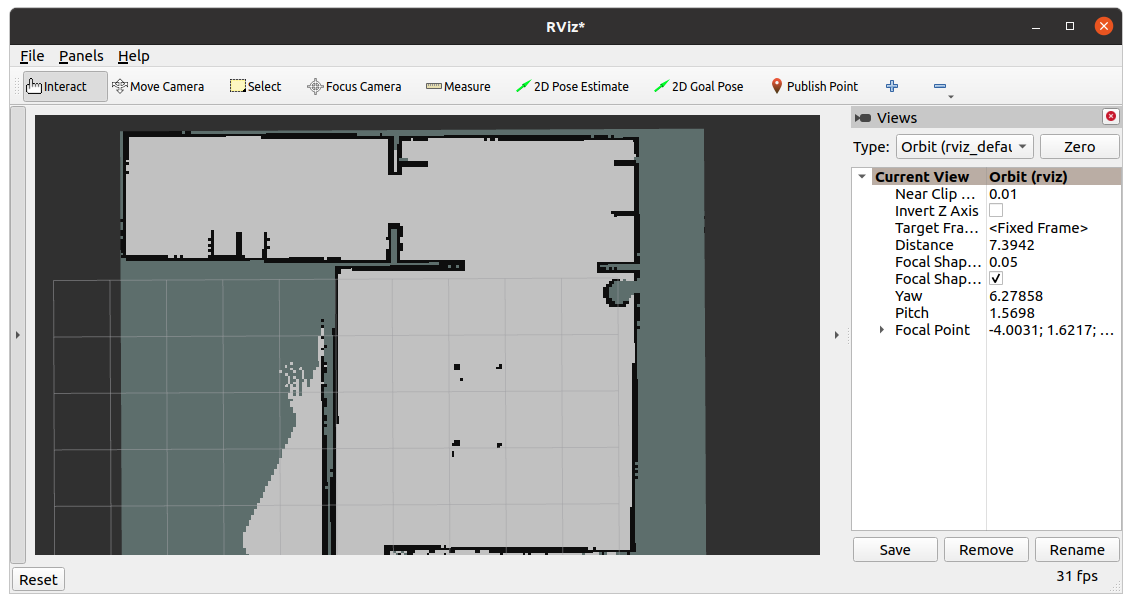
遠隔操作ノードのキー操作により部屋を移動させると地図がどんどん生成されます.地図の生成にはLIDARの情報が使われます.コツとしては,ところどころでロボットを1回転させて部屋全体の情報をLIDARで取得することです.
地図の保存
キー操作によりロボットを動かし環境の地図を作成できたら,次のコマンドで地図を保存しましょう.このように”-f”のオプションをつけると指定したディレクトリにmap.pgmとmap.yamlが保存されます.つけないと実行したディレクトリに保存されます。
$ ros2 run nav2_map_server map_saver_cli -f ~/map
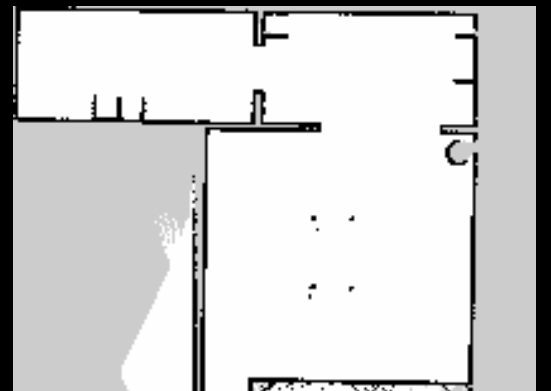
ホームディレクトリのmapディレクトリに以下のようなmap.pgmファイルとmap.yamlファイルが保存されたら成功です.map.pgmファイルは下図のような画像ファイルです.
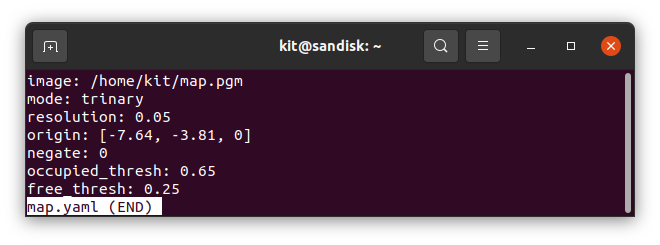
map.yamlファイルは下図のように地図の設定などが書かれています.
 終わり
終わり
コメント