
専門実験2021(ロボット制御)のTAのトレーニングページです.以下のリンクの説明に従って取り組んでください.ほぼ,Robotis e-Manualのリンクを選別したものです.なお,写真では5セットですが,全部で10セットあります.
- Ubuntu20.04のインストール
- USBメモリに以下の要領でUbuntu20.04をインストールします.
- ROS NoeticとOpenMANIPULATOR-Xのインストール
- 以下のリンクに従って,ROS NoeticとOpenMANIPULATOR-Xのインストールを行う.
- コントローラ
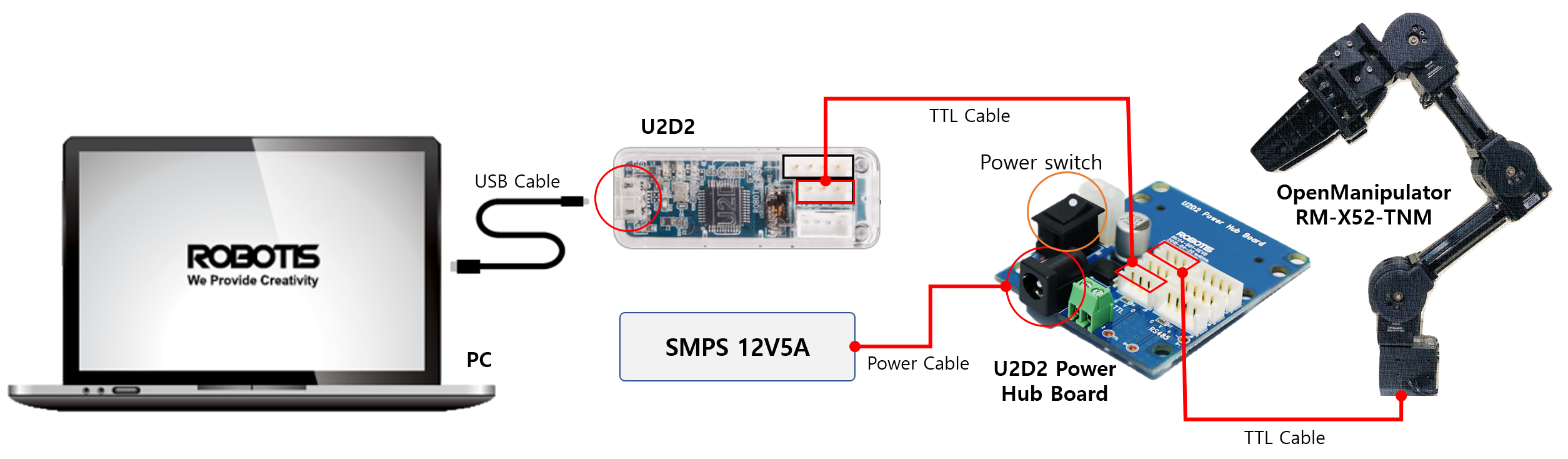
- ロボットとの接続は,次の手順で行います.本実験ではU2D2 (ttyUSB)を使うので,それに該当するコマンドを実行してください.
- U2D2とPCをUSBケーブルで接続する.
- U2D2 Power Hub BoardにACアダプタを接続して,Power switch(電源スイッチ)を入れる.
- 端末を開いて,次のコマンドでttyUSB0というファイルがあるか確認する.あれば,U2D2がコンピュータに認識されている.なければ認識されていないので,接続と電源が入っているか確認する.
- $ ls /dev
- ユーザがデバイスを使えるようにファイルのパーミッションを変更する.
- $ sudo chmod 777 /dev/ttyUSB0
- コントローラを起動する
- $ roslaunch open_manipulator_controller open_manipulator_controller.launch
- 成功すると次のように表示される.
- “[INFO] Succeeded to init /open_manipulator_controller”
オペレーション
-
- GUI 操作
- 別の端末を開き,次のコマンドでGUI操作のプログラムを立ち上げる.予めコントローラが上のコマンドで起動されていなければならない.
- $ roslaunch open_manipulator_control_gui open_manipulator_control_gui.launch
- GUIコントローラが開くので右上の[Timer Start]ボタンをクリックする.
- 左上の”OpenManipulator states”を確認して下図のように”Robot is stopped Actuator enabled”となっていればOK.
- 動かし方
- 初期姿勢:Init poseボタンをクリック
- ホームポジション:Home poseボタンをクリック
- グリッパを開く:Gripper Openボタンをクリック
- グリッパを閉じる:Gripper Closeボタンをクリック
- まず,ロボット各ジョイントの角度[rad]を取得するために,右下の”Joint space”の欄の[Read joint angle]ボタンをクリックする.そうすると今まで0だった角度が現在の角度に変更される.
- ロボットを動かすためには,右下の”Joint space”の欄に,ジョイントの角度[rad]と時間[s]を下図のように入れて,[Send]ボタンをクリックする.
- 別の端末を開き,次のコマンドでGUI操作のプログラムを立ち上げる.予めコントローラが上のコマンドで起動されていなければならない.
- 遠隔操作
- 次のコマンドでキー操作プログラムを起動する.
- $ roslaunch open_manipulator_teleop open_manipulator_teleop_keyboard.launch
- 端末が開き,操作方法が表示されるので,いろいろ試してみる.なお,コントローラを立て上げた端末で[Error]が表示されたら,キー操作を受け付けない.その場合は,その端末でControlキーを押しながらCキーを押してコントローラを落とす.コントローラを落とすとロボットのアクチュエータがオフになり,ロボットが脱力して下に落ち台座と衝突するので注意.手でやさしく受け止めてください.再度,コントローラを立ち上げる.
- 次のコマンドでキー操作プログラムを起動する.
- GUI 操作
- シミュレーション
- ロボットビジョン
- カメラパッケージ
- Kineticしかないので,それを参考にNoeticでウェブカメラが動くパッケージを探す
- ARマーカパッケージ
- Kineticしかないので,それを参考にNoeticでが動くパッケージを探す
- ピック&プレース
- Kineticしかないので,それを参考にNoeticでが動くパッケージを探す
- カメラパッケージ
- MoveIt!
- インストール
- $ cd ~/catkin_ws/src/
- $ git clone https://github.com/ROBOTIS-GIT/open_manipulator_controls.git
- $ git clone https://github.com/ROBOTIS-GIT/open_manipulator_dependencies.git
- $ cd ~/catkin_ws && catkin_make
- 実機での実行
- $ roslaunch open_manipulator_controllers joint_trajectory_controller.launch sim:=false
- シミュレータでの実行
- $ roslaunch open_manipulator_controllers joint_trajectory_controller.launch
- インストール
- USBメモリのクローン
- WSLのインストール
参考サイト
以上


コメント