Webots講座の5回目です.引き続きWebotsの自動運転シミュレータを使っていきます.Webotsにはロボットを動作させるコントローラの他に,スーパバイザ(Supervisor)コントローラがあります.スーパーバイザは管理者という意味で,ロボットではなく人間が行う作業に相当することは,このスーパーバイザ・コントローラで実現できます.例えば,ロボットの真の位置や速度を取得したり,初期位置に戻すなどの作業です.スーパーバイザ・コントローラを使いロボットカーの真の自己位置を取得する方法とシミュレーションを再実行する方法を学びましょう.
レファレンス
- Supervisor Programming (Cyberbotics Ltd.)
- Webots for Automobiles (Cyberbotics Ltd.)
- GPSサンプルコード
- WEBOTS_HOME/projects/samples/devices/worlds/gps.wbt
- WEBOTS_HOMEはwebotsをインストールしているディレクトリ.
- WEBOTS_HOME/projects/samples/devices/worlds/gps.wbt
API
- class Node: ノードクラス
- def getField(self, fieldName): ノードからフィールドのハンドラーを取得する.
- def restartController(self): ロボット用のコントローラを再実行する.
- class Supervisor (Robot): SupervisorクラスはRobotクラスを継承する.
- def simulationReset(self): シミュレーションをリセットする.
真の自己位置の取得方法
- 前回まで学んだコントローラはロボットの制御プログラムで,スーパーバイザ・コントローラは人間の操作に相当するものなので別物です.そのため,別プロセスで動かし並列動作させますが,コードとしては並列動作させるAPIなどは使いません.ロボット用コントローラのプログラムに関しては前回のrobot_car2.pyと同じものを使います.
- スーパーバイザ・コントローラを使うために,まず,そのコントローラを新規追加します.そのコードはこの例では次のサンプルコードを使います.このプログラムでは,スーパーバイザAPIを使って,ロボットの真の位置を取得し,シミュレーションを再実行します.
まず,2行目でスーパーバイザのAPIを使うために,コントローラモジュールからスーパーバイザクラスをインポートし,9行目でスーパーバイザクラスのインスタンスを生成します.12行目のsupervisor.getFromDef(“MyRobotCar”)は,スーパーバイザの対象となるノード(この例ではBmwX5)に対応するノードをシーンツリーから探し返します.なお,引数のvehicleは,オブジェクトのDEFネームでありシーンツリーのオブジェクト名(この例ではBmwX5)とは異なりますので注意しましょう.17,18行目でオブジェクトの位置と姿勢を取得するために,robot_node.getField(“translation”)でtranslationフィールドとrobot_node.getField(“rotation”)でrotationフィールドを取得しています.21,38行目のtrans_field.getSFVec3f()のSFは単一フィールド,Vec3F:は3次元ベクトルを表し,translationフィールドから真の位置を取得し,22行目のrot_field.getSFRotation() でrotationフィールドから真の姿勢を取得しています.
32から36行目はシミュレーションとコントローラをリセットするコードです.15秒経過したら,34行目のsupervisor.simulationReset()でシミュレーションをリセットします.シミュレーションをリセットしてもコントローラはリセットされないので,35行目のrobot_node.restartController() でコントローラを再実行しています.このプログラムでは15秒毎にシミュレーションを再実行することになります.
- サンプルコード
''' supervisor_robot_car.py '''
from controller import Supervisor # コントローラモジュールからスーパーバイザクラスをインポート
from vehicle import Driver # vehcleモジュールからDriverクラスのインポート
from math import sqrt # mathモジュールからsqrtクラスをインポート
import sys # sysモジュールをインポート
TIME_STEP = 10
supervisor = Supervisor() # スーパーバイザクラスからインスタンスを生成
# 以下の処理はシミュレーションループの前に一度だけ呼び出す
robot_node = supervisor.getFromDef("MyRobotCar")
if robot_node is None:
sys.stderr.write("The node is not found in the current world file\n")
sys.exit(1)
trans_field = robot_node.getField("translation") # translationフィールドを取得
rot_field = robot_node.getField("rotation") # rotationフィールドを取得
t0 = supervisor.getTime() # 時刻の取得
init_pos = trans_field.getSFVec3f() # translationフィールドから位置を取得
init_rot = rot_field.getSFRotation() # rotationフィールドから姿勢を取得
print("init_pos=", init_pos)
print("init_rot=", init_rot)
print("*** Start the supervisor controller ***")
# シミュレーションループ
while supervisor.step(TIME_STEP) != -1:
t = supervisor.getTime() - t0
if t >= 15: # 15経過後
print("*** Reset the simulation ***")
supervisor.simulationReset()
robot_node.restartController()
t0 = supervisor.getTime()
values = trans_field.getSFVec3f() # translationフィールドから値(位置)を取得
print("%f[s] Real position:(%g, %g, %g)[m]" % (t, values[0], values[1], values[2]))
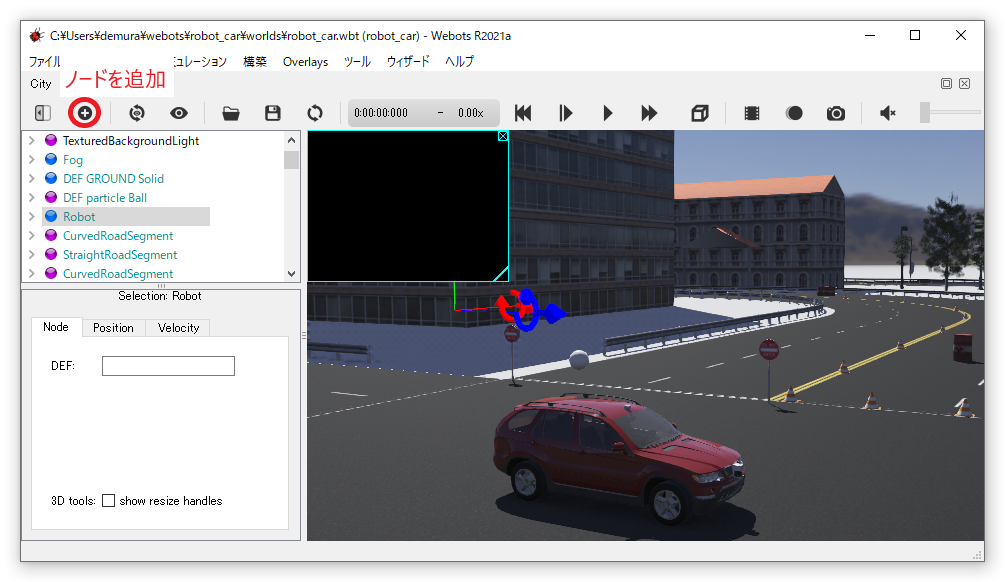
- 次に,スーパーバイザ・コントローラを割り当てるRobotノードをシーンツリーに追加します.ノードは下図の赤丸で囲んだボタンをクリックします.
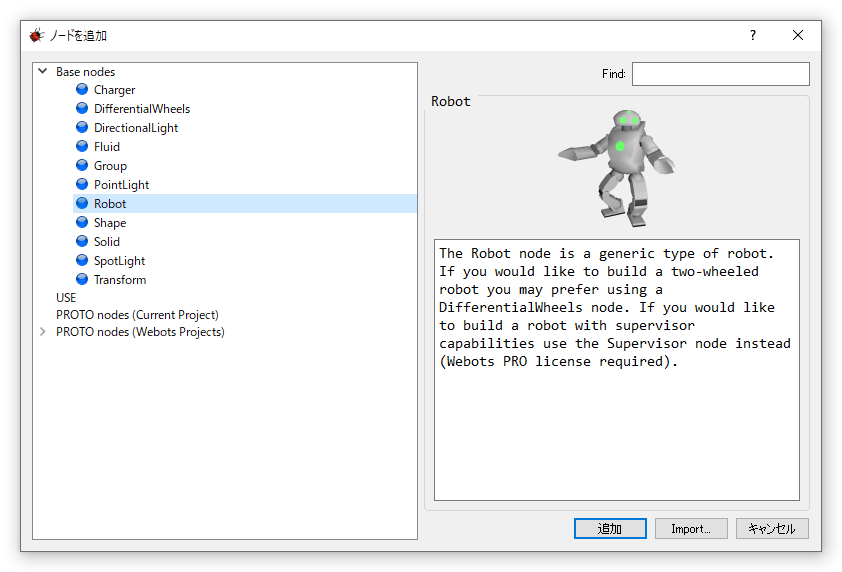
- 「ノードを追加」窓が現れるので,[Base nodes]から[Robot]ノードをクリックして,[追加]をクリックするとシーンツリーにRobotノードが追加されます.
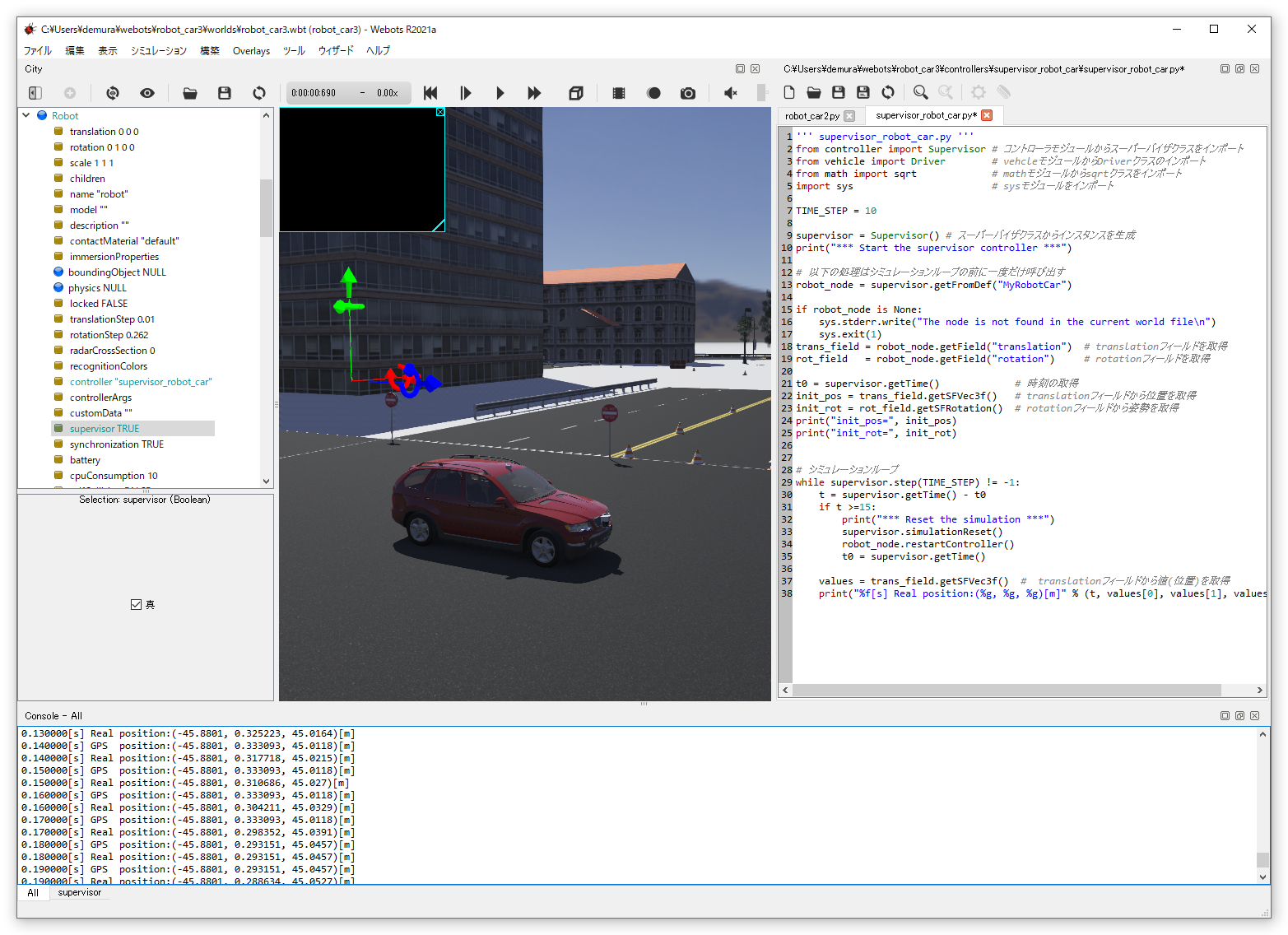
- Robotノードのcontrollerフィールドに説明したスーパーバイザー用のコントローラを割り当てます.supervisorフィールドをTRUE,ロボットのコントローラと同期を取るためにsychronizationフィールドをTRUEに設定します.シーンツリーのフィールドは次のように設定します.
- controller: スーパーバイザ用のコントローラ(この例では”supervisor_robot_car”)
- supervisor: TRUE
- synchronization: TRUE
ハンズオン
- Webots入門講座3:自動運転シミュレータ (Python)で実施した要領で,新規プロジェクトsupervisor_robot_carを作成して,ワールドcity.wbtをワールドsupervisor_robot_car.wbtに上書き保存する.
- Webots入門講座3で作成したrobot_car2.pyと同じプログラムも使うので,上で作成したプロジェクトsupervisor_robot_carに新規コントローラrobot_car2.pyを作成する.作成された雛形コードの中身を全部消して,Webots入門講座3のrobot_car2.pyのコードをコピーする.
- 次に,スーパーバイザ・コントローラを割り当てるRobotノードをシーンツリーに追加し,各フィールドを次のように設定する.
- controller: スーパーバイザ用のコントローラ(この例では”supervisor_robot_car”)
- supervisor: TRUE
- synchronization: TRUE
- サンプルコードをコントローラプログラムとして,シミュレーションを実行して動作を確認しよう.コンソール(Cosole -All)には,ロボットのコントローラとスーパーバイザ・コントローラの出力が図のように表示されます.これを見るとこのシミュレータに搭載されているGPSは精度が高く,真値とさほど変わらないことがわかりますね.こんなGPSを使いたいものです.
- Webots入門講座3のハンズオンとこのサンプルプログラムを改変して,Webots入門講座3のコース1周走らせて,真値とGPSの値をプロットしてみよう.さらに,真値とどのぐらい誤差があるか定量的にも評価しましょう.
終わり


コメント