KESE2: 製作 出村公成 (1999年)
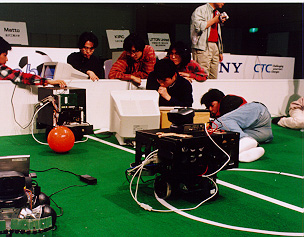
左からNAISTチームのロボット、金沢工大 神武改、KESE2
Japan Open99 名古屋 参加
Japan Open 99に参加するためにKESE1を黒く塗装し、CCDカメラをRFシステム研のPro5からSONY EVI-D30に変更した。その結果、ますます浅田研のロボットに似てしまった。審判も間違ったという逸話がある。
CPUはPentium2-450MHz、タッチセンサ、超音波センサ装備など運動性能以外は浅田研のロボットをスペック的にはうわまっていた。
しかし、ソフトウェアの開発が間に合わず思うように性能を発揮できなかった。特に画像処理プログラムがロバストではなかった。
補足:この当時は表色系としてRGBを使っていた。実験室では物体識別については問題がなかったので閾値を切るソフトウェアも開発していなかった。ロボカップのことがよくわかっていない参加者のやることである。
| Kese2主要パーツリスト |
|
パーツ |
メーカー |
型番 |
|
OS |
Vine Linux |
|
|
CPUボード |
日本データシステム |
PCI-686VRE |
|
CPU |
Intel |
PIII 450MHz |
|
RAM |
|
256MB |
|
電源 |
NSP2-180-H2X |
|
|
ケース |
日本データシステム |
PCB-110 |
|
HDD |
東芝 |
MK1002MAV |
|
Interface Board |
富士通 |
RIF-01 |
|
画像処理ボード |
日立 |
IP5000 |
|
足回り |
メカトロシステムズ |
山彦台車(旧型) |
|
Camera |
SONY |
EVI-D30 |
|
motor driver |
PC-0121-1 |
|
|
Battery |
GS(日本電池株式会社) |
PORATALAC PE12V2.2Ah |

コメント